
一体式蔬菜钵苗取苗爪夹持力检测传感器设计与试验
15页
1、 一体式蔬菜钵苗取苗爪夹持力检测传感器设计与试验 金 鑫 索宏斌 张恒毅 姬江涛,3 张 博 林 诚(1.河南科技大学农业装备工程学院, 洛阳 471003; 2.龙门实验室成套装备科技创新中心, 洛阳 471003;3.河南省机械装备先进制造协同创新中心, 洛阳 471003)0 引言钵苗夹持力是指移栽机作业过程中取苗爪对穴盘苗钵体基质的作用力,是决定钵体破损率与取苗成功率的关键因素1。现有的移栽取苗机构多采用纯机械夹紧方式,缺少对取苗夹持力的感知与检测2。移栽过程中受穴盘苗品种、生长状况以及移栽机稳定性等因素影响,容易导致钵苗夹持力发生改变,出现穴盘苗钵体破损、散坨、漏栽等问题3-5。同时,传感器结构与安装方式易造成夹持力变化,影响取苗爪正常取投动作与传感器自身精度及使用寿命6-8。因此,开展传感器检测与取苗爪作业互适性研究,在实现夹持力检测不干涉取苗爪正常工作的同时,可为后续移栽机末端执行器反馈控制研究提供技术支撑,对全自动蔬菜钵苗移栽机智能升级与低损高效作业具有重要意义。为提高钵苗移栽质量,国内外相关人员做了大量有益探索与研究,相继出现了一些夹持力检测方法与装置。TING等9采
2、用电容式位移传感器检测夹持机构对钵苗施加的夹持力,但检测精度低、灵敏度差;COTTON等10将压电陶瓷作为敏感元件,通过计算传感器与接触物体间的摩擦因数,检测并调节执行机构施加果蔬上的夹持力。周俊等11用压敏电阻作为敏感材料制作了一种灵敏的触觉传感器,用于感知果蔬抓取过程中的力。崔玉国等12提出用电阻应变片来检测钳指的夹持力,采用柔性杠杆放大机构,实现了微小夹持力的测量。JIANG等13将拉力与压力传感器集成在四针夹爪取苗末端执行器上,测定并分析了穴盘与末端执行器对钵体基质的粘附力与夹持力。王俊等14利用压电效应将夹持力转化为电荷量,通过将PVDF压电薄膜粘贴在右取苗爪内侧表面的方式,实现了取苗爪对苗钵夹持力的实时监测。刘双斌等15对绝缘硅橡胶填充纳米导电填料制备出压敏硅橡胶,实现压力数值与范围的检测。LI等16基于线性霍尔元件研制了一种夹茎秆式末端执行器,通过与取苗爪连接的弹性致动片产生类悬臂梁弯曲转化为霍尔传感器的电压变化,实现对夹持力的检测。在已有相关文献中,对夹持力检测多集中于果蔬采摘领域,其末端执行器作业速度慢,传感器安装空间大,作业对象相对穴盘苗较大。针对蔬菜钵苗移栽机夹持
3、力检测,多通过机构设计与优化并配套检测装置实现夹持力检测,少有对夹持力检测传感器与取苗爪作业过程的互适性研究。基于上述研究,针对取苗爪体积小,夹持力检测传感器结构与安装方式干涉取苗爪正常取投动作等问题,本文以PDMS薄膜为介电层,设计一种内置式钵苗夹持力检测传感器,并采用嵌入方式与取苗爪一体化封装,通过传感器性能标定试验与室内取苗试验,验证夹持力传感器的稳定性与适应性。1 取苗爪结构设计1.1 研究对象本文以入钵夹取式全自动蔬菜钵苗移栽机取苗爪为研究对象,以取苗爪正常完成取投动作的同时实现夹持力检测为目标,对移栽机取苗爪作业过程进行分析。取苗移栽机部件及取苗爪如图1所示。取苗过程为:穴盘运动到取苗爪夹取位置后,固定在凸轮上的取苗机构带动取苗爪运动,取苗爪由初始竖直状态变为前伸状态,插入穴孔并夹紧穴盘苗钵体基质,之后随轮系旋转将钵苗带出并投放至鸭嘴漏斗,取苗爪由前伸状态变为竖直状态,准备下一次夹取动作,如此循环,完成取投苗作业。图1 取苗移栽机部件示意图1.2 钵苗夹持力受力分析分析取苗爪夹持钵体基质受力情况,可为传感器安装位置提供参考。不考虑钵体的蠕变及不均匀性,取苗过程中钵体基质受力
4、状况如图2所示。其中Fj1、Fj2为取苗爪对钵体基质的夹持力,Ff1、Ff2为取苗爪对钵体基质的摩擦力,Ff3、Ff4为钵穴与钵体基质间的摩擦力,FN1、FN2为钵体基质与钵穴间切向粘附力,FN3为钵体基质与钵穴间法向粘附力,G为钵体基质自身重力,为夹持角度。为简化计算,将钵体基质在竖直向下的合力定义为FH,则FH满足图2 取苗过程钵体受力分析FH=(Ff3+Ff4+FN1+FN2)cos+FN3+G(1)由于取苗爪径向尺寸较小且外表比较光滑,对钵体基质的内聚力影响较小,忽略取苗过程中取苗爪对钵体基质损失率的影响。为保证取苗成功,钵体基质在竖直方向上的合力必须满足(2)Fj表示不同位置钵体基质对取苗爪的作用力,方向与接触面垂直,计算式为Fj=jA(3)式中j取苗爪不同位置处抗压强度,kPaA钵体基质的夹持受力面积,mm2在计算中,一般将取苗爪对钵体基质的夹持力简化为Fj1、Fj2,在取苗爪夹紧过程中,钵体基质的压缩量随着取苗爪插入深度的增加而增大,相应的取苗爪测力区域与钵体基质不同接触位置夹持力也不同,传感器无法准确输出所需的夹持力。为此,提出一种内置式电容夹持力检测传感器,采用嵌入方
《一体式蔬菜钵苗取苗爪夹持力检测传感器设计与试验》由会员金***分享,可在线阅读,更多相关《一体式蔬菜钵苗取苗爪夹持力检测传感器设计与试验》请在金锄头文库上搜索。

一场饱含行业情怀的纤维革新之旅
一例黄体期长方案降调节中多卵泡发育的病例报道及文献分析

一元一次不等式与一次函数课例探析
一例恶性黑色素瘤患者使用卡度尼利单抗导致的免疫性心肌炎的个案护理-第1篇
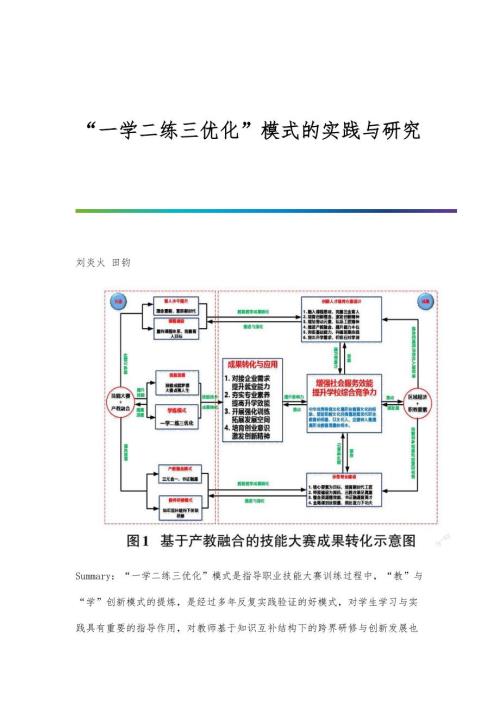
一学二练三优化模式的实践与研究
一医一药一患药学服务模式的效果评价研究
一对一带教双轨教学在产科学实习中的应用价值分析
一例三阴性终末期乳腺癌患者的安宁疗护实践
一对一责任制助产护理对减少产妇不良情绪及促进妊娠的效果分析
一堂新授课的教学设计探究-直线与圆的位置关系
一元二次方程教学实践中的逆向思维研究
一小的整体解决离不开高质量的儿童友好产业
一例典型道路交通事故车辆灯光使用情况鉴定案例分析
一体式主动脉弓分支重建支架治疗累及左锁骨下动脉的主动脉穿透性溃疡疗效分析△
一例II型Waardenburg综合征的基因突变分析
一家企业集团如何通过司库体系打好金融牌
一带一路倡议下东北亚经济合作研究
一场美读和项目式学习的双向奔赴-以《阿房宫赋》教学为例
一例犬髋关节脱位的诊断治疗
一体式蔬菜钵苗取苗爪夹持力检测传感器设计与试验
 短肠综合征的营养支持新方法
短肠综合征的营养支持新方法
2024-05-10 22页
睾丸癌的纳米药物靶向递送系统研究
2024-05-10 20页
睾丸癌的病理类型与预后因素
2024-05-10 19页
睾丸素在衰老过程中的作用
2024-05-10 20页
睑裂畸形的胚胎学发育与遗传学研究
2024-05-10 24页
砍创类武器损伤痕迹规律
2024-05-10 24页
睑裂畸形的康复训练与长期随访
2024-05-10 23页
睾丸扭转坏死后睾丸间质细胞的功能变化
2024-05-10 21页
知识传递中经验和权威的平衡
2024-05-10 22页
砍创类武器痕迹绘制技术
2024-05-10 24页