
喷涂机器人设计.pdf
28页
1、第 1 章 绪 论 随着人类科技的进步,社会经济的发展,机器人学成为近几十年来迅速 发展的一门综合学科。 它体现了光机电一体化技术的最新成就, 机器人作为其 中的佼佼者更是发挥了不可磨灭的作用。 在人类社会中, 凡是有机械活动的地 方, 都能看到机器人的身影。 机器人产品的应用已经由核工业和军事科技等高 端科学领域向医疗、 农业甚至是服务娱乐等民用领域发展了, 并且各式各样的 机器人正在涌现出来, 以惊人的速度延伸到人类活动的各个领域。 机器人是由 于人类期望生产水平的提高, 为了提升生产效率而出现的。 然而由于机器人善 于完成重复的,单调的,精确度要求高的工作,能取代人在恶劣的环境中完成 人类不能或者不愿完成的工作, 因此, 机器人的出现又大大解放了人类的生产 力。 所以说机器人的发展是社会发展的结果, 也是社会发展的必然趋势。 现在, 很多发达国家都追逐着机器人这一发展趋势, 积极地进行着机器人的各种开发 和研制的工作, 并且其中一些国家已经取代了不错的成果, 研制出了许多新型 且实用的机器人或者是机器人。例如:日本的跳舞机器人、犬型机器人爱宝 (AIBO);英国研制的履带式“手推
2、车”及“超级手推车”排爆机器人;美国 iRobot 公司推出了能避开障碍,自动设计行进路线吸尘器机器人 Roomba;上海世博 会使用过的福娃机器人等等。 由于机器人的迅猛发展,机器人进入学校教学是必然的。三自由度机器 人作为是机器人的典型产品,其设计及应用对机电一体化、机械结构工艺、机 械制造、自动化、电子信息等专业的教学及研究都有着很重要的意义。 1.1 机器人的特点 1 机器人能进行自动化生产,降低成本。就本次设计的喷涂机器人而言, 它能不间断的搬运零件和各种材料的输送。 这样既提高了生产率又降低了生产 成本。 2 机器人能使产品品质稳定,减少人工污染。人工生产会使产品质量受 工人状态起伏而影响。对于某些高精度产品,人工送取会产生人工污染。 3 机器人能改善劳动条件,避免各种工伤。在高温、高压、低温、低压、 有灰尘、 噪声、 臭味、 有放射性或有其他毒性污染以及工作空间狭窄的场合中, 人工操作会有危险,机器人能代替人工作,改善了人们的劳动条件。 4 机器人能持久、耐劳,可以把人从繁重的劳动中解放出来,人在连续 工作几个小时后,总会感到疲劳或厌倦,以机器人代替人进行工作,可以避免
3、由于操作疲劳或疏忽而造成的人身事故。 5 机器人的灵活性、通用性强。它能通过更换部件来适应不同产品的生 产。 并通过改变程序和自由度来达到迅速改变作业的可能性。 这样机器人能满 足各种各样的零件生产,在生产中发挥重大作用。 1.2 机器人的组成 工业机器人是由执行机构、驱动机构和控制机构三部分组成。 1.2.1 执行机构 一般机器人的执行机构由手部或者叫抓取部分、腕部、臂部、缓冲与定 位,还有行走机构组成。 1.2.2 驱动机构 驱动机构主要有液压驱动、气动驱动、电动驱动和机械驱动等形式。不 过目前还是以液压和气动用的最多。 液压驱动具有体积小、出力大、控制性能好、动作平稳等特点,它利用 油缸、马达加上齿轮、齿条实现直线运动;利用摆动油缸、马达与减速器、油 缸与齿条、齿轮或链条、链轮等实现回转运动。液压驱动具有润滑性能好、寿 命长的特点,结构紧凑,刚性好。定位精度高,克实现任意位置开停。有很多 专业机器人能直接利用主机的液压系统。 但缺点是需要配备压力源, 系统复杂 成本较高。 气动驱动结构简单、造价低廉、气源方便,所需的压缩气源一般工厂都 有,并且无污染,一般采用的压力 0.40.6
4、MPa,最高可达 1MPa。缺点是出力 小,体积大。由于空气的可压缩性大,很难实现中间位置的停止,只能用于点 位控制,而且润滑性较差,气压系统容易生锈。 电动由于减速和回转运动变往复运动机构复杂, 很少采用。机械式用于 简单的场合。 1.2.3 控制机构 机器人的控制方式有点动和连续控制两种方式。大多数是用插销板进行 点位程序控制,也有采用可编程序控制器控制、微型计算机数字控制,采用凸 轮、磁盘磁带、穿孔卡等记录程序。主要控制的是坐标位置,并注意其加速度 特性。 1.3 喷涂机器人 喷涂机器人又叫喷漆机器人(spray painting robot) , 是可进行自动喷漆 或喷涂其他涂料的工业机器人, 1969 年由挪威 Trallfa 公司 (后并入ABB集 团) 发明。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱 动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。多采用 5 或 6 自由 度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般 有 23 个自由度,可灵活运动。较先进的喷漆机器人腕部采用柔性手腕,既 可向各个方向弯曲,又可转动,其动作
《喷涂机器人设计.pdf》由会员小**分享,可在线阅读,更多相关《喷涂机器人设计.pdf》请在金锄头文库上搜索。
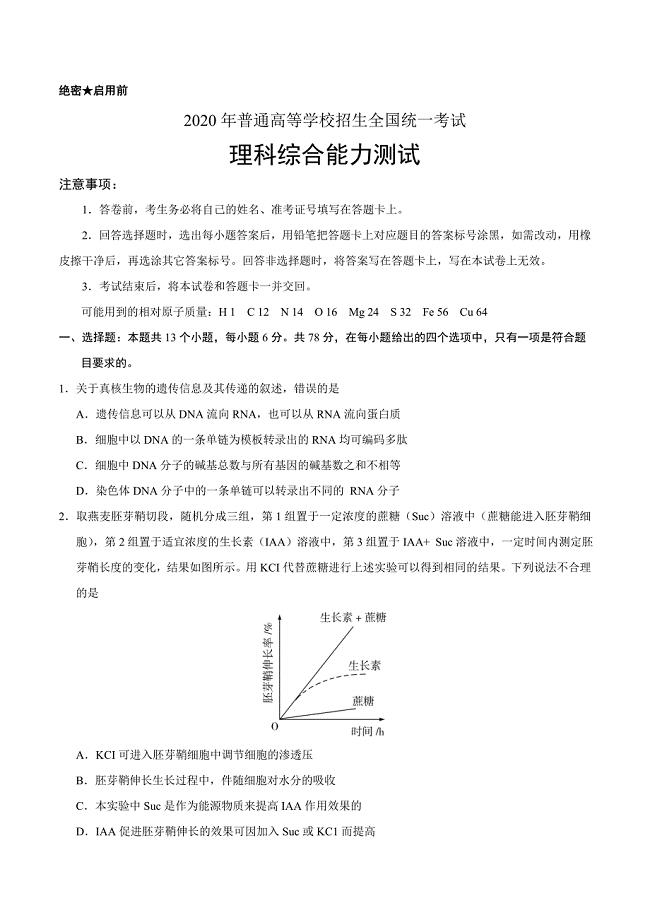
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 09.石油公司制度体系诊断及优化咨询项目
09.石油公司制度体系诊断及优化咨询项目
2024-04-08 33页
职工教育培训经费管理办法(规模生产制造业版)
2024-04-08 10页
08.圆通银行战略咨询项目
2024-04-08 25页
企业培训费管理实施暂行细则
2024-04-08 12页
职工教育培训经费管理办法(适合中小企业)
2024-04-08 10页
企业规章制度框架体系管理规定(2024修订版)
2024-04-08 21页
05.景宏集团全面管理提升咨询项目
2024-04-08 40页
07.玉兔食品集团供应链咨询项目
2024-04-08 34页
04.大华乳业业务战略咨询项目
2024-04-08 28页
06.德邦公司精益生产管理咨询项目
2024-04-08 28页