
机器人操作系统ROS典型功能代码详解
99页
1、机器人操作系统ROS: 典型功能代码详解李宝全 目录目录1ROS API 介绍3Demo3/talker.cpp3/listener.cpp4/add_two_ints_server.cpp4/add_two_int_client.cpp5#CmakeList.txt5ROSARIA81/RosAria.cpp8#CmakeList.txt192/rosaria_teleop_key.cpp193/rosaria_teleop_code.cpp21#CmakeList.txt22Images25/image_converter.cpp /包 cv_bridge仅有的一个程序25/hud_gui_simplified.cpp26/usb_cam.h27/usb_cam.cpp28/usb_cam_node.cpp44#usb_cam/CmakeList.txt47NiTE, Tf的发布48/tf2_ros/transform_broadcaster.h 系统48/tf2_ros/transform_broadcaster.cpp系统48/tf/transform_broadcaster.
2、h49/tf/transform_broadcaster.cpp50/tf2_ros/transform_listener.h50/tf/transform_listener.h51/openni_tracker.cpp节点54#CmakeList.txt57Tf的接收, 并以控制P3AT做示范58/TfListnerAria.cpp58#CmakeList.txt59语音发布60/sound_play.h60/SoundDemo.cpp62#CmakeList.txt63#test/CmakeList.txt64语言接收, 显示/再发声64/VoiceBridgeNode.cpp64#CMakeList.txt64/RespondVoice.cpp65#test/CMakeList.txt66ROS_OpenTLD-GUI66/tld_gui_node.cpp66/base_frame.hpp66/base_frame.cpp68/ui_baseFrame.h72/base_frame_graphics_view.hpp75/base_frame_graphics_view.cpp7
3、6ROS_OpenTLD-tracker79/tld_node.cpp79/main.hpp80/main.cpp82ROS_OpenTLD-launch87/ros_tld_gui.launch87/ros_tld_tracker.launch87ROS_OpenTLD-msg88/BoundingBox.h88/Target.h91ROS_OpenTLD-git-opentld/main94ROS数据类型95/std_msgs/Float3295/std_msgs/Char95/std_msgs/String95/std_msgs/Header95/sensor_msgs/Image95/sensor_msgs/Image_encodings?96/sound_play/SoundRequest96/geometry_msgs/Twist96/geometry_msgs/TransformStamped96ROS系统程序文件96/fill_image.h96/cv_bridge.h系统97/cv_bridge.cpp101Linux系统程序文件101/usr/include/lin
《机器人操作系统ROS典型功能代码详解》由会员桔****分享,可在线阅读,更多相关《机器人操作系统ROS典型功能代码详解》请在金锄头文库上搜索。

通用技术水平考试模拟测试题解答
生产15吨粉料、3吨颗粒料项目商业计划书写作模板
投资咨询习题汇总
2022年高考英语二轮复习 短文语法填空训练(1)
乡镇党委年度党风廉政建设工作总结
中学母爱的作文锦集十篇
2023年湖南长沙市市场监督管理局招考聘用普通雇员笔试题库含答案+解析
2023年06月浙江嘉兴市南湖区万舟幼教集团招考聘用合同制教师笔试题库含答案+解析
高层建筑施工现场消防安全系统管理思考
王肇民画语拾零
车间个人工作计划范文(2篇).doc
供货方案及工期保证措施
中国医科大学21秋《卫生信息管理学》在线作业三满分答案6

破碎机安装技术措施
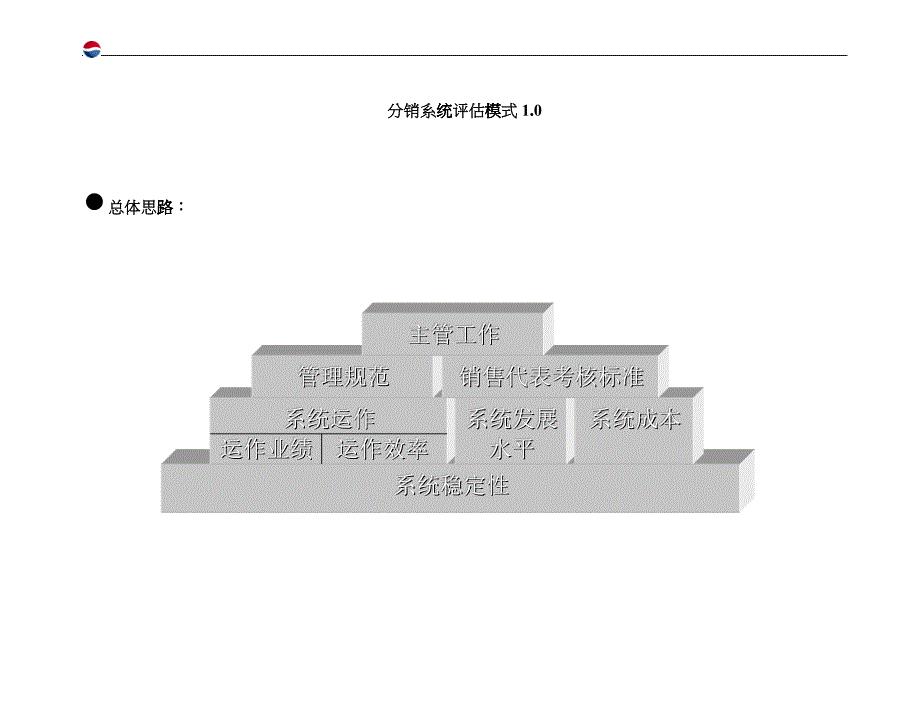
分销系统评估模式
变压器调试方案
公司财务部工作总结(二篇).doc
小学五年级班队工作计划(三篇).doc
房地产营销工作总结模板(二篇).doc
2021年北师大版数学二年级下册第三单元测试卷
 泡沫灭火器的基本原理
泡沫灭火器的基本原理
2023-09-11 3页
水文学原理复习提纲
2023-10-21 5页
税库银横向联网系统操作流程
2022-12-31 12页
北大16秋《计算机基础与应用-第六组》在线作业
2023-09-28 9页
机械设备的购销合同范本(二).doc
2023-06-04 9页
编译原理实验教学大纲
2023-02-20 7页
信息系统项目管理师论文评分参考标准
2022-12-20 18页
基于单片机控制的开关电源设计论文
2023-07-19 43页
电磁场与电磁波课程教学大纲
2023-05-26 15页
C语言简单贪吃蛇游戏代码
2023-11-22 4页