
PID参数的调整方法
2页
1、精品文档PID 参数的调整方法(APM适用 )先来了解一下 P 项、 I 项和 D 项的基本内容。这里只用通俗语言简单解释,给出一些简单实用的调整方法。有需要深入研究的用户,请自行查阅相关资料。P 项相当于一个变化率,数值越大,变化越快。假设俯仰到升降通道的P 值为 60 时,机头从上抬20到变回水平位置,需要5 秒钟时间,那么P 值为 30 时,这个时间就大于5秒(比如10 秒), P值为 120 时,这个时间就小于5 秒(比如2.5 秒)。D项相当于一个“阻尼器”,数值越大,阻尼越大,控制越“硬”。如果飞机在水平直飞时,在横滚方向上老是振荡,那么可以调小“副翼通道”的值,如果飞机在横滚方向上的增稳效果不好(即偏离水平位置后很难再回复到原来状态),那么可以调大该D值。I项相当于一个“加分器”,使控制量更贴近目标量,但也有可能加过头了。例如,如果要使飞机从100 米爬升到 200 米,而飞机只爬到199 米就不再爬升, 那么, 此时需要增大I 值;但如果飞机爬到201 米才停下来,那么,此时应该减小I 值。下面简单描述一下在试飞调试阶段进行PID 参数调整的步骤。第一步:规划并上传一个
2、矩形航线。高度不要太高,比如50 米,这样便于肉眼观察高度变化。第一个航点和最后一个航点距离稍微近点,相邻航点间距离为300 米 400 米为宜。让飞机在视野范围内压线飞行。第二步:切入自动模式,让飞机沿着这个航线飞行。第三步:看增稳控制效果。先使用默认参数。副翼通道上:P=95,I=5,D=8 。俯仰到升降通道:P=95,I=3 ,D=8。注意到各项目上类似于“P/128 ”的字样,其中“P”指 P 项,“ 128”是可以输入的最大值。此外,每个项目上能填入的最小数值为零。横滚和俯仰上的调整方法类似,此处只讲横滚。如果飞机在横滚方向上左右振荡,那么同时调小P 值和 D 值, I 值一般固定不动。如果飞机在横滚方向上的增稳效果不好,那么同时调大P 值和值,值一般固定不动。第四步:试着改变目标高度,看定高效果。如果飞机爬升或俯冲速度太慢,就增大“高度到俯仰角”的P 值,反之减小P 值。如果在爬升或俯冲过程中,机头振荡得厉害,就减小“高度到俯仰角”的D值。最后,如果飞机无法爬升到预设高度,就增大“高度到俯仰角”的I 值,相反减小值。在这里, 调大 P值,一般是把初始俯仰角调大,调小 P 值,一般是把初始俯仰角调小。参考前文关于位置控制的解释,就能理解这里的意思。如果不能理解,就不要深究。第五步:看飞机在到达航点时的转弯效果。如果转弯速度太慢,就增到“方向舵通道”的P 值,反之减小P 值。如果转弯时机头来回振荡,就减小D 值,如果转弯时机头上没有阻尼的感觉,就增大值。在这里, 调大 P值,一般是把初始倾斜角调大,调小 P 值,一般是把初始倾斜角调小。参考前文关于位置控制的解释,就能理解这里的意思。如果不能理解,就不要深究。第六步:看飞机的压线效果。如果飞机切入航线时的速度太慢,就增大“偏侧距”的P 值,反之减小值。如果飞机在航线上左右扭动,就减小“偏侧距”的D 值,而如果没有阻尼的感觉,就增大值。在这里,调大 P 值,一般是把初始夹角调大,调小 P 值,一般是把初始夹角调小。参考前文关于位置控制的解释,就能理解这里的意思。如果不能理解,就不要深究。(本帖最后由yiny0730于 2011-12-6 13:08编辑)。1 欢迎下载精品文档欢迎您的下载,资料仅供参考!致力为企业和个人提供合同协议,策划案计划书, 学习资料等等打造全网一站式需求。2 欢迎下载
《PID参数的调整方法》由会员汽***分享,可在线阅读,更多相关《PID参数的调整方法》请在金锄头文库上搜索。
高级财务会计独家
2023年06月黑龙江省齐齐哈尔市梅里斯达斡尔族区事业单位公开招聘29名工作人员笔试题库含答案附带解析
新课标人教版四年级上册数学教学计划
期末总复习(4)第四、五章复习题
KM(知识管理)实施调研问卷
高一地理必修一教案全集
核级防火布项目建议书写作模板
精选业务员的辞职报告八篇
寄语大学新生
四川轮胎研发项目建议书(范文)
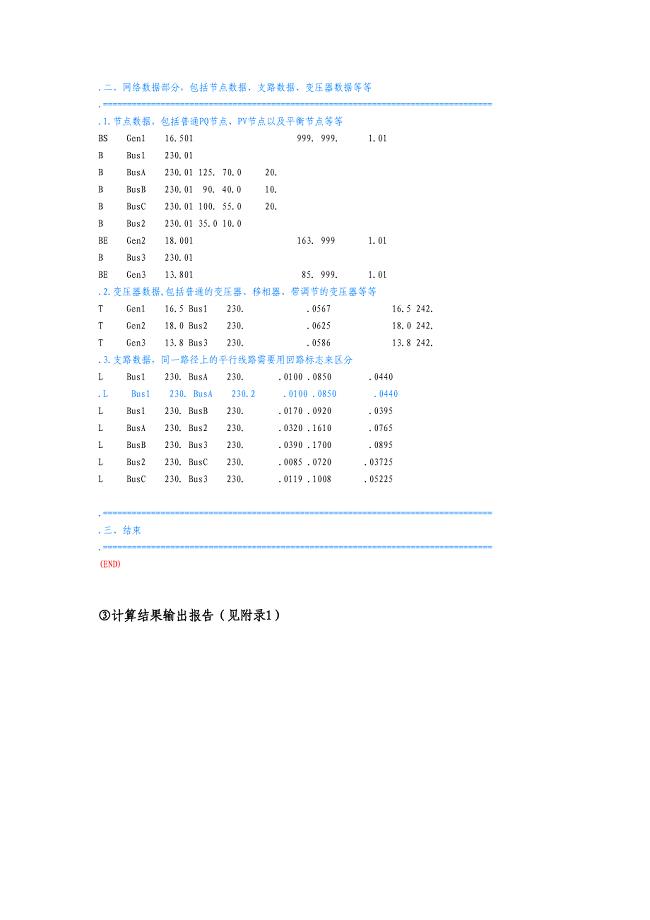
IEEE9数据及结果
汽车空调压缩机支架项目可行性研究报告
圆柱和圆锥知识点总结
2023少先队队员申请书
幼儿教师外出学习心得体会例文
医院医保工作总结范文(2篇).doc
2022心理学专业求职自荐信范文
互联网+教育平台助力学校信息化建设汇报——校内外平台应用分享
大树移植运用的可行性
难忘的背影中考优秀作文.doc
 企业环保隐患排查治理自查报告
企业环保隐患排查治理自查报告
2023-12-08 5页
重大风险防控预警机制预案
2022-12-24 3页
企业上半年工作总结及下半年计划汇报纲要(发布)
2022-12-04 6页
局域网课程设计报告小型宿舍网的组建
2023-10-28 6页
蛋白FITC标记及葡聚糖凝胶柱使用
2022-11-01 11页
精编疫情升旗仪式某小学校长讲话稿(一)
2023-10-22 8页
在公司信息化工作会议上的讲话
2022-10-25 8页
空压机控制器MAM-660.doc
2022-11-07 17页
等效电阻的计算题(培优)
2023-12-18 3页
招标竞价流程规则登记表-范文
2022-12-12 11页