
RTKPPP定位算法流程--精选文档
15页
1、1 基础知识1.1 GPS精密单点定位的基本原理GPS精密单点定位一般采用单台双频GPS接收机,利用IGS提供的精密星历和卫星钟差,基于载波相位观测值进行的高精度定位。观测值中的电离层延迟误差通过双频信号组合消除,对流层延迟误差通过引入未知参数进行估计。1.2 时间系统RTKLIB内部使用GPST(GPST时间)用于GNSS的数据处理和定位算法。数据在RTKLIB内部处理之前,需要转换成GPST时间。使用GPST的原因是避免处理润秒。RTKLIB使用以下结构体表示时间:typedef structtime_t time; /* time(s) expressed by standard time_t */double sec; /* fraction of second under 1 s */ gtime_t;1.2.1 GPST和UTC(Universal Time Coordinated)关系参考【图1】,参考【图2】:图1 转换关系公式图 2通过使用GPS导航信息中的UTC参数,GPST到UTC或者UTC到GPST之前的转换可以用更准确的表达方式,如【图3】。图 3这些参数是由
2、GPS导航消息提供的。1.2.2 BDT(北斗导航卫星系统时间)BDT(北斗导航卫星系统时间)是一个连续的时间系统,没有润秒。开始历元的时间是【UTC 2006年1月1号 00:00:00】。北斗时间计算公式【图4】:图 4UTC和GPST时间转换同上面的GPS一样,只不过UTC参数来自与北斗导航信息中。1.3 坐标系统接收机和卫星的位置在RTKLIB中表示为在ECEF(地心地固坐标系)坐标系统中的X, Y, Z组件。1.3.1 大地坐标到ECEF坐标的转换转换公式如【图5】。第三个公式最后一行有错有错,应该为: (v(1 e2)+h)sin图 5参数说明: a : 地球参考椭球的长半径 f : 地球参考椭球的扁平率h: 椭球高度 : 纬度 : 经度当前版本的RTKLIB使用的值为【图6】:图 6图7 参考椭球体1.3.2 ECEF坐系到大地坐标的转换转换公式如【图8】图 81.3.3 本地坐标到ECEF坐标的转换在接收机位置的本地坐标,也被称为ENU坐标,通常使用在GNSS导航处理。ECEF坐标到本地坐标转换的旋转矩阵表示为【图9】。图 9 Er旋转矩阵参数说明:接收机位置的纬度:接
3、收机位置的经度通过使用Er和接收机的坐标rr【ECEF】,坐标recef【ECEF】可以被转换到本地坐标的坐标rlocal,公式如【图10】。图 102 RTKPPP定位算法2.1 单点定位(pntpos)1:satposs 2: estpos 3: estvel1. 计算计算卫星位置、速度和时钟(satposs)a) 通过广播星历计算卫星钟差(ephclk) 卫星编号到卫星系统的转换(satsys)根据卫星的编号,获取到对应的卫星导航系统。 选择星历(seleph)1、传入信号传输时间,卫星编号,导航数据等参数。2、遍历导航数据,遍历导航数据里面的星历数据,判断星历数据的卫星编号是否和传入的卫星编号相等。3、如果星历数据的卫星编号和传入的卫星编号相等,就计算星历参考时间(toe)和信号传输时间的时间差。如果不相等,继续处理下一条星历数据。4、判断计算出来的时间差,如果时间差大于了允许的最大时间差,继续查找下一个星历数据。否则,判断时间差最小的星历数据,记录星历数据的位置。5、返回之前记录出来的星历数据。 使用广播星历计算卫星时钟偏差(eph2clk)1、 传入信号发射时刻的时间和星历
4、数据。2、 计算信号发射时刻的时间和本时段钟差参数参考时间(星历参数toc)的时间差。3、 通过下式计算钟差,这里还没有处理相对论校正项和tgd:(代码中有个迭代过程,资料上没看到写)卫星钟差计算出来之后,信号发射时刻的时间还要加上这个钟差。b) 计算卫星在信号发射时刻的位置、速度和时钟(satpos)根据星历表选项来选择不同的处理,如下: 广播星历(EPHOPT_BRDC): ephpos (广播星历到卫星位置和钟差)1、 根据公式计算出tk;2、 根据使用的卫星系统,选择使用的地球引力常数(mu)和地球的角速度(omge)3、 根据公式计算出平近点角M。4、 求解开普勒方程,按照以下公式迭代求解。5、 根据以下公式计算出u(改正后的纬度幅角), r(改正后的径向), i(改正后的轨道倾角) 的值。6、 根据以下公式计算卫星在轨道平面内的坐标。7、 根据不同的卫星系统,做不同的计算。GPS计算方式:北斗计算方式:其中8、 按照公式计算出时间tc。9、 按照以下公式计算出钟差和钟漂。 精密星历(EPHOPT_PREC): peph2pos 广播+SBAS(EPHOPT_SBAS):sa
《RTKPPP定位算法流程--精选文档》由会员新**分享,可在线阅读,更多相关《RTKPPP定位算法流程--精选文档》请在金锄头文库上搜索。
动力环境监控设备维保合同
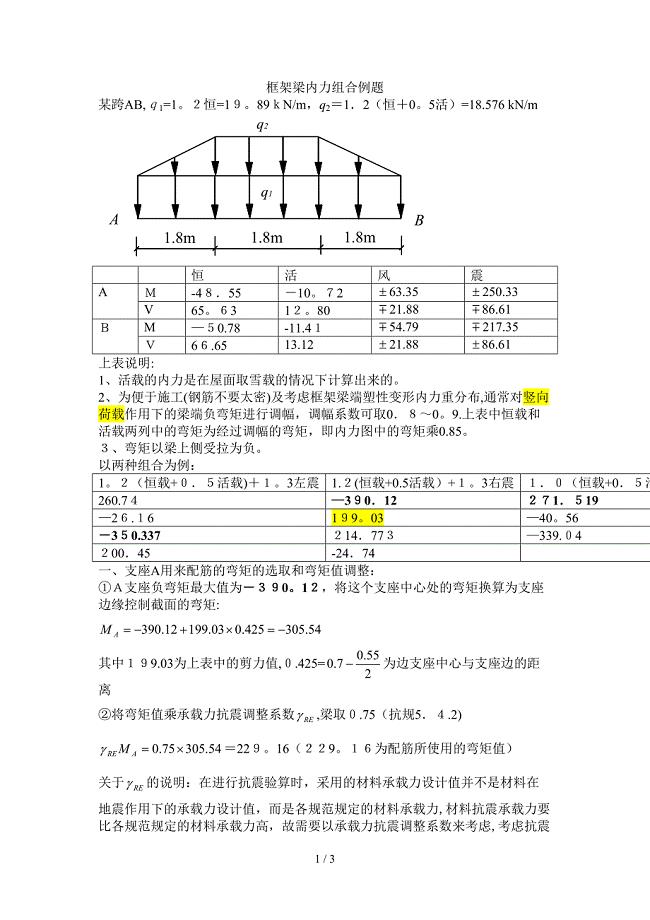
框架梁内力调整例题
微车车灯开关项目资金申请报告写作模板-定制代写
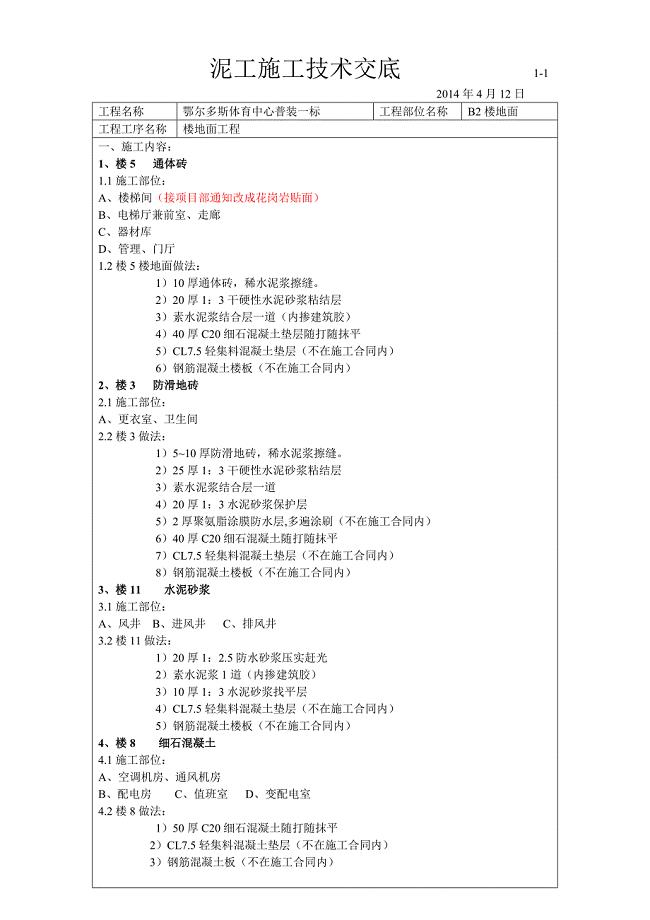
体育中心楼地面工程泥工施工技术交底
宿舍楼项目预应力混凝土管桩工程施工方案

办公室文员年终个人工作总结2023(二篇).doc
油水分离池项目建议书写作模板
农产品生产环节质量安全的问题和措施

秘书部工作计划(15篇)

2016年成都市五年级下册金牛区数学期末真题

普通地质学课后复习题汇总

媒介融合环境下电视台人力资源管理探究
主题班会报告以习惯为主题
新平县高原电力装备项目投资分析报告

海上风电场电力传输与海底电缆的选择
2022年高中语文老师岗位职责
校园应急预案
电子化政府采购系统使用手册
幼儿国旗下讲话稿
一级建造师建筑工程考试历年真题汇编(精选)含答案76
 qPCR实验操作流程--精选文档
qPCR实验操作流程--精选文档
2023-08-26 6页
财务部门岗位说明书
2023-04-08 4页
保安人员工作手册
2022-11-11 5页
RS232,RS485波形分析--精选文档
2022-08-12 2页
KTV安全工作方案--精选文档
2022-09-04 12页
建筑工程安全报监书表格
2023-06-22 30页
PPP项目风险管理及对策--精选文档
2023-09-01 25页
汽车维修厂维修质量制度.doc
2023-06-25 14页
pHG-206PH计说明书内容
2023-03-28 13页
ISMS手册-信息安全管理体系手册--精选文档
2024-02-26 39页