
机器人硬件电路设计
31页
1、本科学年论文简易人形机器人的设计院 系电子信息工程学院自动化系专业名称 自动化年级 2008级学生姓名 张宇哲学号 指导教师仲兆楠日 期 2011年09月本文介绍的人形机器人采用新华龙公司的C8051F310单片机为控制核心, 利用舵机完成人形机器人的各种动作。该人形机器人可以完成下蹲、起立、走步, 侧移和踢球等动作。舵机均采用单片机C8051F310内部的PCA模块产生的PWM 波调节其转向和转角的大小从而实现人形机器人的各种动作。关键字:C8051F310舵机PCA模块PWMDesign and Realization Humanoid RobotBased on MCUAbstractHumanoid Robot that is described in this article is using Nc Dragon single-chip microcomputer as control core , using rudder to complete various action。The Humanoid Robot can complete the squatting , s
2、tanding up , walking , lateral moving and kicking actions. Rudder is controlled by PWM waves produced by C8051F310 MCU internal PCA module . Those actions is achieved through adjusting steering and rudder angle .Keywords: C8051F310 Rudder PCA module PWM目录概述3硬件电路设计3一 电源电路3二单片机电路3三RS 485总线4四舵机电路4五.PCB制作5软件设计7一. 主板程序7二子板程序22总结27附录28概述本次的设计主题为人形机器人,主要对人形机器人的腿部进行设计与制作。 使用新华龙C8051F310单片机作为主控芯片。通过该单片机的PCA模块产生的 PWM波来控制舵机的运动。对腿部的控制需要三块电路板,一块主控板,两块 从板。主控板主要用来通过485总线向从板发送数据指令,而从板则接收主板的 指令来完成相应的控制。舵机的具体动作时依
《机器人硬件电路设计》由会员m****分享,可在线阅读,更多相关《机器人硬件电路设计》请在金锄头文库上搜索。
高一历史空前严重的资本主义世界经济危机
XX区数智渔业综合服务平台项目建设意见
2019-2020部编版人教版一年级数学上册期末试卷11
关于文化体育活动经费绩效评价年度工作报告

2021年审计工作心得体会
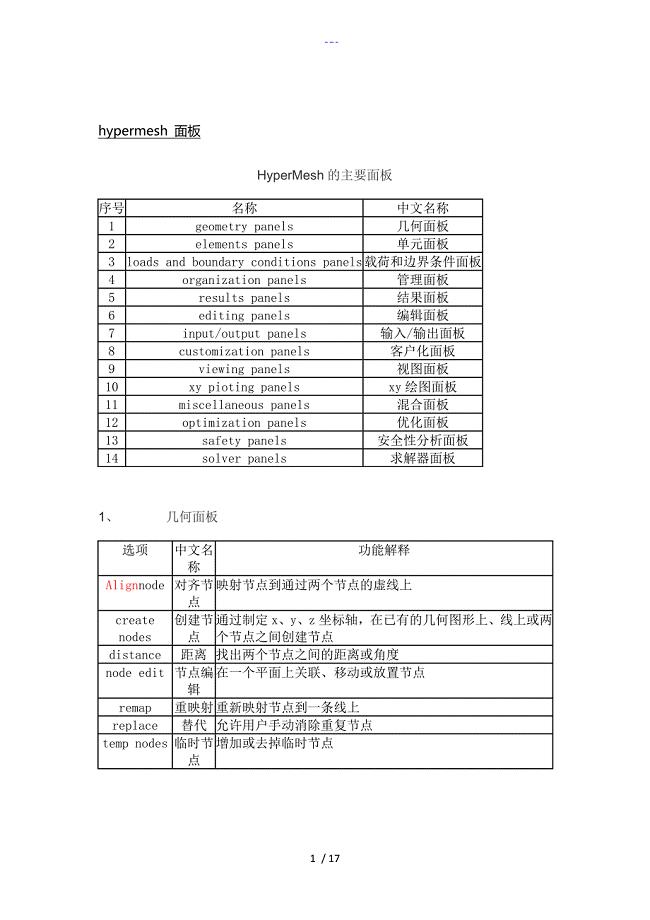
hypermesh常用面板与快捷键
2022年护士年终工作总结范文
客户经理的辞职报告3篇
铁路考试题库完整
素描概论教案
植树捐款倡议书示例
滁州市第三届小学生写字大赛各年级必写的30个基本字
2022年证券从业资格考试模拟卷含答案第276期
岭南版八年级下册美术教案
宣城市关于成立危险化学品安全生产检测公司分析报告
精编数学北师大版选修23教案 第一章 第十二课时 二项式定理 Word版含答案
第五章 以人为中心的健康照顾 4h
会计助理实习个人工作计划参考样本(二篇).doc
证券公司投资银行类业务内部控制指引
外商直接投资外汇业务操作专题规程
 感冒病因病理及各种疗法
感冒病因病理及各种疗法
2023-09-11 37页
第一章数控系统概述
2023-05-05 20页
教师结构化面试材料题
2023-02-18 30页
古典文献学的相关名词解释
2022-11-27 7页
陶瓷釉下、釉中、釉上的区别
2023-08-15 11页
现有轿车发动机工作原理及优缺点分析
2023-09-25 11页
精选安全用电协议书三篇
2024-01-04 8页
加强堤防水利工程的专项维修和日常养护
2023-04-01 3页
有机肥发酵技术说明
2023-05-14 4页
溢洪道除险加固设计
2023-01-23 12页