
PID控制算法的C语言实现
44页
1、PID控制算法的C语言实现一 PID算法原理 最近两天在考虑一般控制算法的C语言实现问题,发现网络上尚没有一套完整的比较体系的讲解。于是总结了几天,整理一套思路分享给大家。 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的,想想牛顿的力学三大定律吧,想想爱因斯坦的质能方程吧,何等的简单!简单的不是原始的,简单的也不是落后的,简单到了美的程度。先看看PID算法的一般形式: PID的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。这里我们规定(在t时刻): 1.输入量为rin(t); 2.输出量为rout(t); 3.偏差量为err(t)=rin(t)-rout(t); pid的控制规律为 理解一下这个公式,主要从下面几个问题着手,为了便于理解
2、,把控制环境具体一下: 1.规定这个流程是用来为直流电机调速的; 2.输入量rin(t)为电机转速预定值; 3.输出量rout(t)为电机转速实际值; 4.执行器为直流电机; 5.传感器为光电码盘,假设码盘为10线; 6.直流电机采用PWM调速 转速用单位 转/min 表示; 不难看出以下结论: 1.输入量rin(t)为电机转速预定值(转/min); 2. 输出量rout(t)为电机转速实际值(转/min); 3.偏差量为预定值和实际值之差(转/min); 那么以下几个问题需要弄清楚: 1.通过PID环节之后的U(t)是什么值呢? 2.控制执行器(直流电机)转动转速应该为电压值(也就是PWM占空比)。 3.那么U(t)与PWM之间存在怎样的联系呢?(见附录1)这篇文章上给出了一种方法,即,每个电压对应一个转速,电压和转速之间呈现线性关系。但是我考虑这种方法的前提是把直流电机的特性理解为线性(见附录2)这篇文章就可以了解了。所以在正式进行调速设计之前,需要现有开环系统,测试电机和转速之间的特性曲线(或者查阅电机的资料说明),然后再进行闭环参数整定。这篇先写到这,下一篇说明连续系统的离散化
3、问题。并根据离散化后的特点讲述位置型PID和增量型PID的用法和C语言实现过程。PID控制算法的C语言实现二 PID算法的离散化 上一节中,我论述了PID算法的基本形式,并对其控制过程的实现有了一个简要的说明,通过上一节的总结,基本已经可以明白PID控制的过程。这一节中先继续上一节内容补充说明一下。 1.说明一下反馈控制的原理,通过上一节的框图不难看出,PID控制其实是对偏差的控制过程; 2.如果偏差为0,则比例环节不起作用,只有存在偏差时,比例环节才起作用。 3.积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差。 4.而微分信号则反应了偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的快速性。 好了,关于PID的基本说明就补充到这里,下面将对PID连续系统离散化,从而方便在处理器上实现。下面把连续状态的公式再贴一下: 假设采样间隔为T,则在第K T时刻:偏差err(K)=rin(K)-rout(K);积分环节用加和的形式表示,即err
4、(K)+err(K+1)+;微分环节用斜率的形式表示,即err(K)-err(K-1)/T;从而形成如下PID离散表示形式:则u(K)可表示成为:至于说Kp、Ki、Kd三个参数的具体表达式,我想可以轻松的推出了,这里节省时间,不再详细表示了。其实到这里为止,PID的基本离散表示形式已经出来了。目前的这种表述形式属于位置型PID,另外一种表述方式为增量式PID,由U上述表达式可以轻易得到:那么:这就是离散化PID的增量式表示方式,由公式可以看出,增量式的表达结果和最近三次的偏差有关,这样就大大提高了系统的稳定性。需要注意的是最终的输出结果应该为u(K)+增量调节值;PID的离散化过程基本思路就是这样,下面是将离散化的公式转换成为C语言,从而实现微控制器的控制作用。PID控制算法的C语言实现三 位置型PID的C语言实现 上一节中已经抽象出了位置性PID和增量型PID的数学表达式,这一节,重点讲解C语言代码的实现过程,算法的C语言实现过程具有一般性,通过PID算法的C语言实现,可以以此类推,设计其它算法的C语言实现。 第一步:定义PID变量结构体,代码如下:struct _pid float
《PID控制算法的C语言实现》由会员hs****ma分享,可在线阅读,更多相关《PID控制算法的C语言实现》请在金锄头文库上搜索。
车工实习工作总结
母亲节感恩母亲的演讲稿四篇
2023年湖北省孝感市汉川市新堰镇群力村社区工作人员考试模拟题含答案
浙江关于成立元数据开发利用公司可行性分析报告(范文)
二级齿轮减速器同轴式机械设计课程设计说明
行政前台年终工作总结
关于交流会主持词模板集合7篇
【施工方案】管道过桥施工方案(DOC 11页)
新课标高考生物复习工作的总结与反思
电子科技大学21春《基于J2EE的开发技术》在线作业二满分答案51
空调操作使用说明书
【word版】2023年银行营销培训心得体会10篇
《颐和园》快乐练习:课堂达标
平安夜活动策划书范文
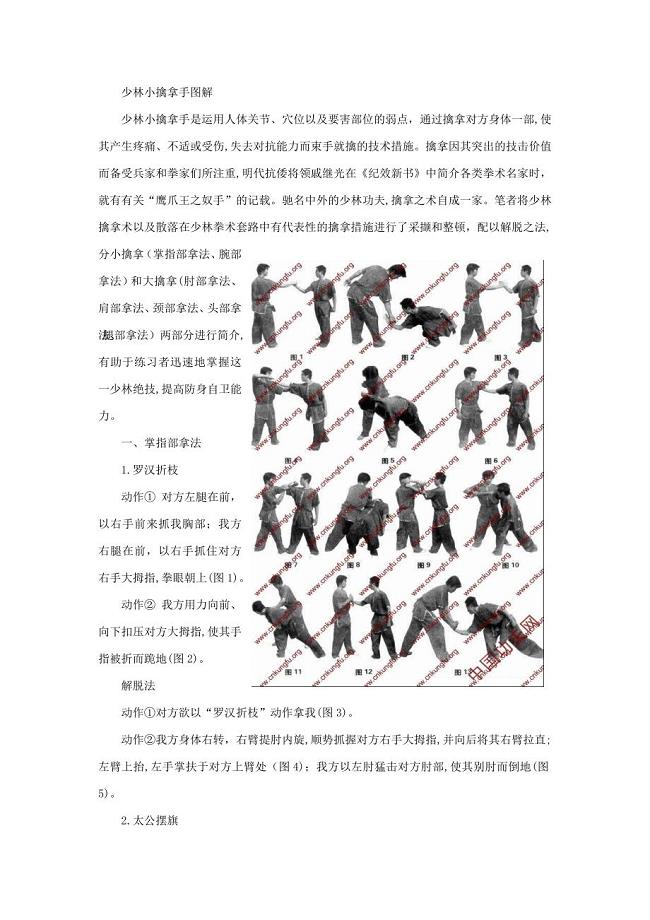
少林小擒拿手图解
牛津译林版八年级上册 Unit5Wild animals Task 校本练习(word版无答案)
监理单位工程监理总结编写方法
农村副主任竞聘演讲稿
2021年建军节军人演讲稿范文.doc
2022初级会计【会计实务】考试模拟题(含答案解析).docx
 编译原理语法分析CharStack
编译原理语法分析CharStack
2022-08-12 2页
中央空调冷却水循环节能控制系统设计
2022-12-27 8页
计算机应用基础16春形考作业
2022-11-12 16页
数量性状的分子标记(QTL定位的原理和方法讲义)
2023-12-03 22页
江西省2018年上半年通讯类安全员考试试题
2023-05-01 8页
PIC单片机指令系统和汇编语言程序设计
2023-10-15 4页
电容器的型号命名方法
2023-10-02 3页
万维网数据库模拟
2023-01-21 11页
数控加工G代码及介绍(FANUC系统)
2023-07-18 7页
电厂入厂煤验收管理标准
2023-05-11 12页