
点云数据处理方法
3页
1、点云数据在形状检测和分类、立体视觉、运动恢复结构、多视图重建中都有 广泛的使用。点云的存储、压缩、渲染等问题也是研究的热点。随着点云采集设备的普及、双目立体视觉技术、VR和AR的发展,点云数据 处理技术正成为最有前景的技术之一。PCL是三维点云数据处理领域必备的工具和基本技能。1. 点云滤波(数据预处理)点云滤波,顾名思义,就是滤掉噪声。原始采集的点云数据往往包含大量散 列点、孤立点点云滤波的主要方法有:双边滤波、高斯滤波、条件滤波、直通滤波、随机 采样一致滤波、VoxelGrid滤波等,这些算法都被封装在了 PCL点云库中。2. 点云关键点我们都知道在二维图像上,有Harris、SIFT、SURF、KAZE这样的关键点提 取算法,这种特征点的思想可以推广到三维空间。从技术上来说,关键点的数量 相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在一起,组成 关键点描述子常用来形成原始数据的表示,而且不失代表性和描述性,从而加快 了后续的识别,追踪等对数据的处理了速度,故而,关键点技术成为在2D和3D 信息处理中非常关键的技术。常见的三维点云关键点提取算法有:ISS3D、Harr
2、is3D、NARF、SIFT3D,其 中NARF算法是用的比较多的。3. 特征和特征描述如果要对一个三维点云进行描述,光有点云的位置是不够的,常常需要计算 一些额外的参数,比如法线方向、曲率、纹理特征等等。如同图像的特征一样, 我们需要使用类似的方式来描述三维点云的特征。常用的特征描述算法有:法线和曲率计算、特征值分析、PFH、FPFH、3D Shape Context、Spin Image 等。PFH:点特征直方图描述子,FPFH:跨苏点特征直方图描述子,FPFH是PFH 的简化形式。4. 点云配准点云配准的概念也可以类比于二维图像中的配准,只不过二维图像配准获取 得到的是x,y,alpha,beta等仿射变化参数,三维点云配准可以模拟三维点云 的移动和旋转,也就是会获得一个旋转矩阵和一个平移向量,通常表达为一个4 X3的矩阵,其中3X3是旋转矩阵,1*3是平移向量。严格说来是6个参数, 因为旋转矩阵也可以通过罗格里德斯变换转变成1*3的旋转向量。常用的点云配准算法有两种:正态分布变换和著名的ICP点云配准,此外还 有许多其它算法,列举如下:ICP:稳健 ICP、point to p
《点云数据处理方法》由会员枫**分享,可在线阅读,更多相关《点云数据处理方法》请在金锄头文库上搜索。
机械原理习题集答案
9-枫树上的喜鹊
2022年文案策划的年终工作总结7篇
职业病危害项目申报表
好用的五一劳动节演讲稿汇总5篇
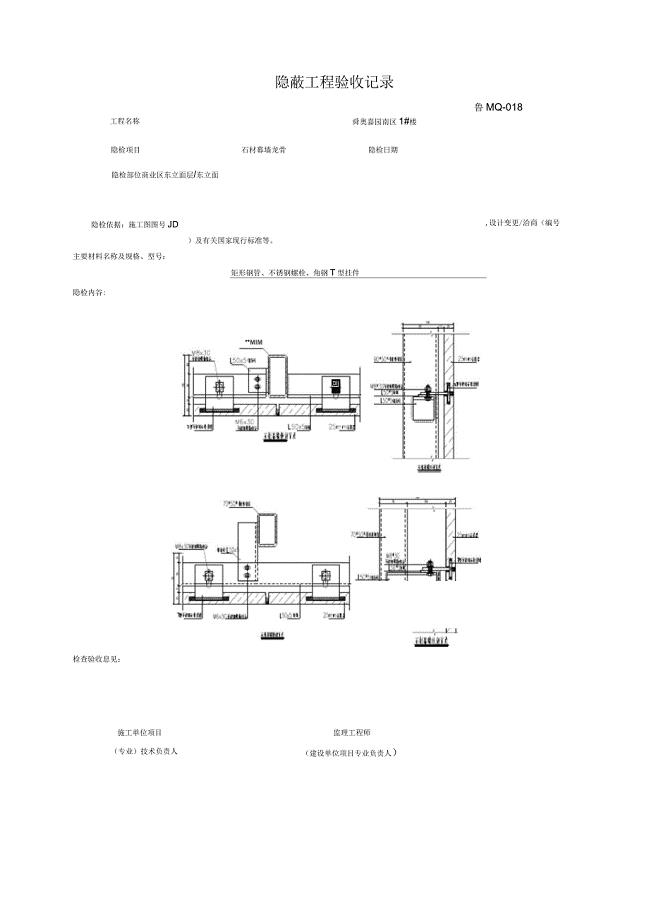
石材幕墙隐蔽工程验收记录
四路抢答器设计实验报告
激励与沟通企业初创经验
2019年商场终总结范文
初级经济师《房地产经济》资格证书考试内容及模拟题含参考答案19
2023电子的实习报告模板集合8篇
视频监控项目合同书
季铵碱(盐)等项目资金申请报告写作模板代写
2022年毕业班家长会讲话稿
2022年中式烹调师(技师)考试内容及复审考试模拟题含答案第15期
2023年注册会计师会计或有事项模拟试卷及答案与解析

2022新生军训个人体会(7篇)

公务车自查报告
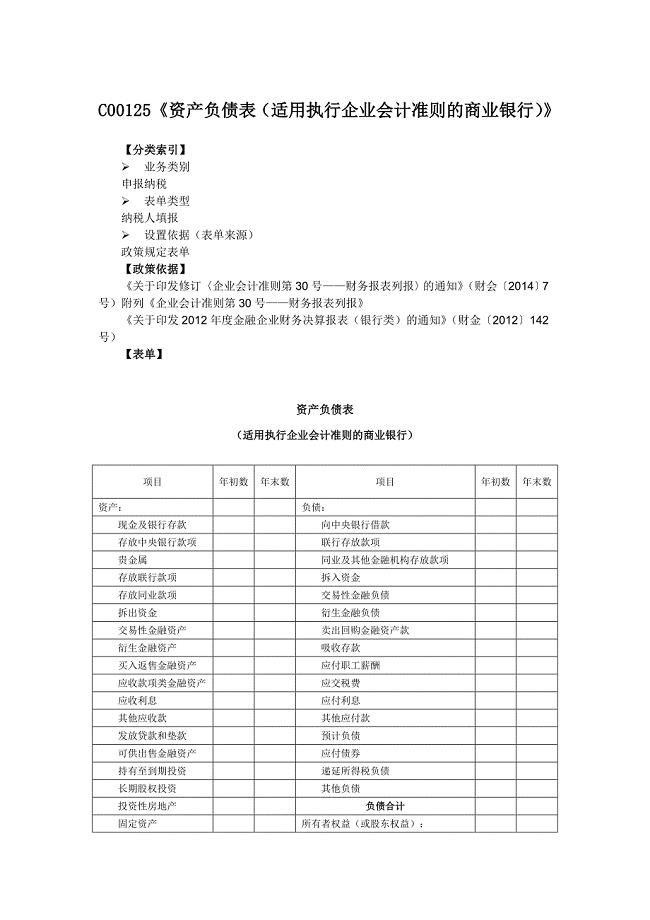
C00125《资产负债表(适用执行企业会计准则的商业银行)》
机电系2013年度汽车专业负责人工作总结
 2019年商场终总结范文
2019年商场终总结范文
2022-12-07 11页
固废管理计划
2023-03-04 33页
灭火器材的性能及使用
2023-07-24 10页
房产门户网站推广策略与方法分析
2022-08-28 5页
微电子实习报告基于单片机的交通信号灯控制系统
2023-02-01 30页
无菌检查阳性结果原因分析方法探讨
2023-03-06 3页
电解铜补助申请报告
2023-11-09 25页
长方形面积计算练习课
2023-04-08 3页
大偻强直性脊柱炎诊疗方案
2023-05-06 5页
收费站设备日常保养制度
2022-11-18 12页