
应用MATLAB解决四杆机构角位移和角速度设计
7页
1、应用MATLAB解决四杆机构角位移和角速度题 干:已知曲柄摇杆机构的四杆长度为L1=304.8mm,L2=101.6mm, L3=254.0mm,L4=177.8mm.曲柄角速度2=250rad/s,试用M文件编写程序计算连杆3和摇杆4的角位移, ,角速度,并绘制出运动曲线。机构如下图。求解方法及公式:对于四杆机构存在如下公式:闭环矢量方程:写成角位移方程的分量式: 求解角位移方法利用牛顿-辛普森公式将分量式写成如下形式:从示意图可知杆1角位移恒为0,设曲柄2初始角位移为0。对于连杆3,和摇杆4的角位移表示为预计值与微小修正因子之和。表示如下: 将上式按泰勒级数展开,去掉高次项得到如下公式:=0 =0将上式写成矩阵形式: + = 利用矩阵求出连杆3和摇杆4的微小修正因子,将修正因子与预计值相加求出角位移,将求出的角位移带入中,看是否满足函数值足够小。若不满足将求出的角位移作为预计值再次计算,直至函数满足条件。此时便求出的角位移。角速度的求解方法:将角位移方程的分量式求导得到如下公式:将上式写成矩阵形式,具体如下: = 利用上式便可求出连杆3和摇杆4的角速度.编程思路以及程序:设计思路:
2、 杆1作为机架则角位移为0,为已知量,曲柄2的角位移为均匀变化的量,连杆3和摇杆4的角位移为未知量。曲柄2初始角位移从0开始做等步长变化,利用for循环求角位移,每次循环中再利用for循环进行迭代,其中用if语句判断求出的角位移是否满足条件,若满足条件则跳出迭代循环,并将求出的角位移存入定义的矩阵中。最后利用绘图函数绘出角位移曲线。 求解角速度是依据求出的角位移进行计算,用for循环,每次循环将对应的角位移带如公式进行计算,得出的角速度存入角速度矩阵,同样利用绘图函数绘制角速度曲线。程序如下: l1=304.8;l2=101.6;l3=254.0;l4=177.8;dr=pi/180.0;r1=0*dr;r2=0*dr;r3=43*dr;r4=95*dr;zl=12*dr;for n=1:30 for n2=1:5 c=(l2*cos(r2)+l3*cos(r3)-l1-l4*cos(r4); d=(l2*sin(r2)+l3*sin(r3)-l4*sin(r4); if (c*c0.0000001&d*d0.0000001) break; else e=-l2*cos(r2),-l3
3、*cos(r3),l1,l4*cos(r4) -l2*sin(r2),-l3*sin(r3),0,l4*sin(r4) f=-l3*sin(r3),l4*sin(r4) l3*cos(r3),l4*cos(r4) x=inv(f)*e; r3=r3+x(1)*dr; r4=r4+x(2)*dr; end end r34(n,:)=r2/dr r3/dr r4/dr; r2=r2+zl;endsubplot(1,2,1)plot(r34(:,1),r34(:,2),r34(:,1),r34(:,3)axis(0 360 0 170)gridxlabel(时间/s)ylabel(从动角位移/度)title(角位移线图)text(110,110,摇杆4角位移)text(50,55,连杆3角位移)sd2=250;T=2*pi/sd2;for n=1:30 ct=n*zl; g=-l3*sin(r34(n,2)*dr),l4*sin(r34(n,3)*dr) l3*cos(r34(n,2)*dr),-l4*cos(r34(n,3)*dr); h=sd2*l2*sin(ct) -sd2*l2*cos(ct); sd=inv(g)*h; sd3=sd(1); sd4=sd(2); sd34(n,:)=n sd3 sd4; t(n)=n*T/30;endsubplot(1,2,2)plot(t,sd34(:,2),t,sd34(:,3)axis(0 0.026 -190 250)gridtitle(角速度线图)xlabel(时间/s)ylabel(从动件角速度/rad)text(0.001,170,摇杆4角速度)text(0.015,130,连杆3角速度)角位移及角速度曲线如下:
《应用MATLAB解决四杆机构角位移和角速度设计》由会员壹****1分享,可在线阅读,更多相关《应用MATLAB解决四杆机构角位移和角速度设计》请在金锄头文库上搜索。
撰写工作总结的方法和技巧五篇范文
景观方案设计任务书样本
装配式超低能耗零碳建筑建材研发生产基地项目商业计划书写作模板-招商融资
销售人员转正工作总结(5篇).doc
东北财经大学21春《管理信息系统》在线作业三满分答案16
感谢母亲作文5篇对母亲感谢的作文
年终总结结尾范文2
建筑幕墙胶送检清单
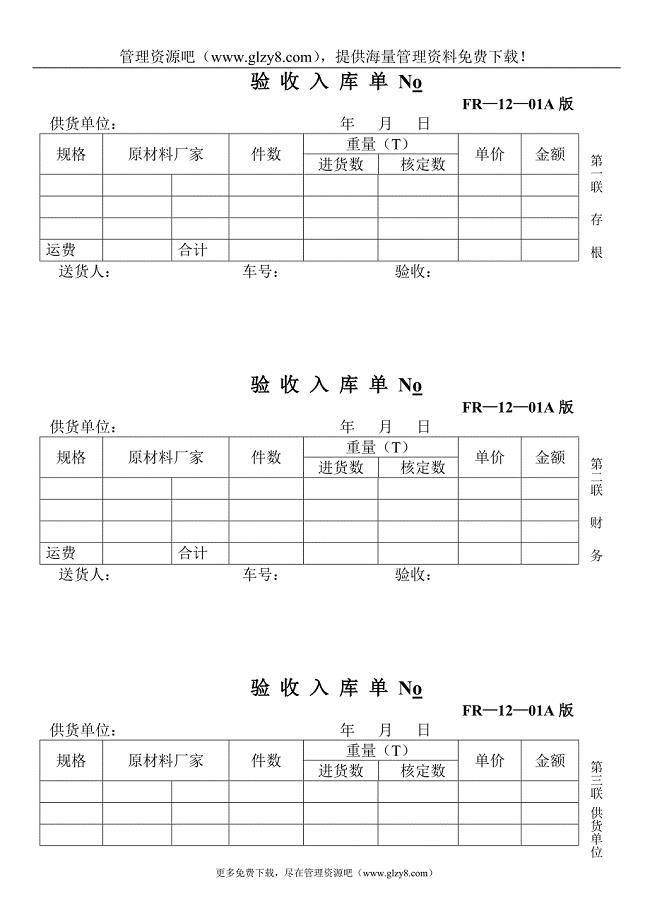
12—01验收入库单 No

历年真题:初级护师资格考试试题综合知识真题及答案
烟草公司的年终总结

幼儿中班科学教学计划.doc
开班仪式上领导励志讲话稿范文
2023高中生暑假的学习计划标准样本(2篇).doc
商场春节工作计划怎么写(热门69篇)
七夕情人节活动总结最新五篇范文
ktv服务员工作总结参考样本(二篇).doc
五年级语文教案凡卡
抚州关于成立化学原料药研发公司可行性报告模板范文
民谣吉他自学入门乐理零基础者必看(DOC)(DOC 9页)
 高中毕业典礼方案
高中毕业典礼方案
2023-07-30 12页
2010合作承包经营建筑分公司合同协议书
2023-12-10 5页
交通安全学习宣传资料.doc
2022-09-08 57页
临床医技科室管理台账规范表单
2024-01-28 29页
学院两提一创专题研讨会发言稿
2024-02-28 2页
恶劣天气行车安全指引
2024-03-07 4页
输液反应应急预案演练记录.doc
2023-09-12 18页
县发改局副局长三年思想工作总结
2023-09-27 6页
一所新学校工作总结(共8篇)
2022-08-20 52页
酒店宾馆装修改造合同.doc
2023-01-31 11页