
《计算机控制技术》试题集
13页
1、一 一、填空题(每空2分,共20分)1闭环负反馈控制的基本特征是 。2闭环控制系统里,不同输出与输入之间的传递函数分母 。3惯性环节的主要特点是,当其输入量发生突然变化时,其输出量不能突变,而是按 变化。4静态误差系数是系统在典型外作用下精度的指标,静态误差系数越大,精度 。5系统的相稳定裕度gM,定义为开环频率特性在截止频率wc处 。6离散系统稳定性与连续系统不同,它不仅与系统结构和参数有关,还与系统的 有关。 7零阶保持器是一个相位滞后环节,它的相频特性(w)= 。 8若已知闭环系统自然频率为wn,经验上,采样频率ws应取 。9通常把叠加在被测信号上的干扰信号称为 。10为使传感器特性与A/D变换器特性相匹配,通常应在传感器与A/D之间加入 。二、选择题(每题2分,共10分)1在计算机控制系统里,通常当采样周期T减少时,由于字长有限所引起的量化误差将 。 A 增大;B 减小;C 不变。2控制算法直接编排实现与串联编排实现相比,有限字长所引起的量化误差 。 A 较大;B 较小;C 相当。3某系统的Z传递函数为G(z) = 0.5(z+0.5) / (z+1.2)(z-0.5) ,可知
2、该系统是 。 A稳定的;B不稳定的;C 临界稳定的。4若以电机轴的转角为输入量,电机轴的转速为输出量,则它的传递函数为 环节 。 A 积分;B 微分;C 惯性。5在确定A/D变换器精度时,通常要求它的精度应 传感器的精度。 A 大于;B 小于;C 等于。 三、简答题(每小题5分,共20分)1 图1为水箱水位自动控制系统,试说明基本工作原理。 图12 已知单位负反馈闭环控制系统的单位阶跃响应的稳态误差为0.1,试问该系统为几型系统,系统的开环放大系数为多少? 3试简单说明系统稳定性与稳态误差相互矛盾的关系。 4试表述采样定理,并说明若一高频信号采样时不满足采样定理,采样后将会变成何种信号。 四、(10分)已知单位负反馈系统开环传递函数为 G(s)=wn2/s(s+2zwn)实测求得单位阶跃响应的s%=4.3%,ts=2.5秒,试写出闭环传递函数并求wn,z为多少。五、(10分)现已知某炉温变化范围为01000,测试时,采用9位的A/D变换器(带符号位),试问此时系统对炉温变化的分辩率为多少。若测试时,通过变送器将测试起点迁移到500,保持同样的系统对炉温变化的分辩率,试问此时可采用几位的
3、A/D变换器就可以了。六、(10分)已知系统方块图如图2所示 图 21)试写出系统闭环传递函数 2)若K=2,试求使系统稳定的T取值范围。 (已知Z1/s2=Tz/(z-1)2)七、(20分)已知调节器传递函数为 , T=0.5秒1)试用一阶向后差分变换法,将其离散,求Gc(z)=?2)将Gc(z)用第二种直接程序法编排实现,试求u (k)表达式,并画出结构图;3)将该算法分成算法I与算法II,并画出编程的流程图。 计算机控制技术试题(3)评分标准(参考) 一、 填空题(每空2分,共20分)1 测量偏差、纠正偏差;2相同; 3按指数规律变化;4越高;5相角与180度之差;6采样周期;7-wT/2; 810wn;9串模干扰;10调理电路。二、选择题(每空2分,共10分)1 A;2A;3B;4B;5 B。 三、简答题(每小题5分,共20分)1 由于出水干扰QO使水位下降时,浮子下降,进水口打开,水位逐渐增高,浮子逐渐上浮,当达到给定高度时,浮子将进水口堵死,从而保持设定高度。21) 零型系统;2) 0.1=1/(1+K) K=93通常,在系统正向通道加入积分环节或增大开环放大系数,将会减少
《《计算机控制技术》试题集》由会员小**分享,可在线阅读,更多相关《《计算机控制技术》试题集》请在金锄头文库上搜索。
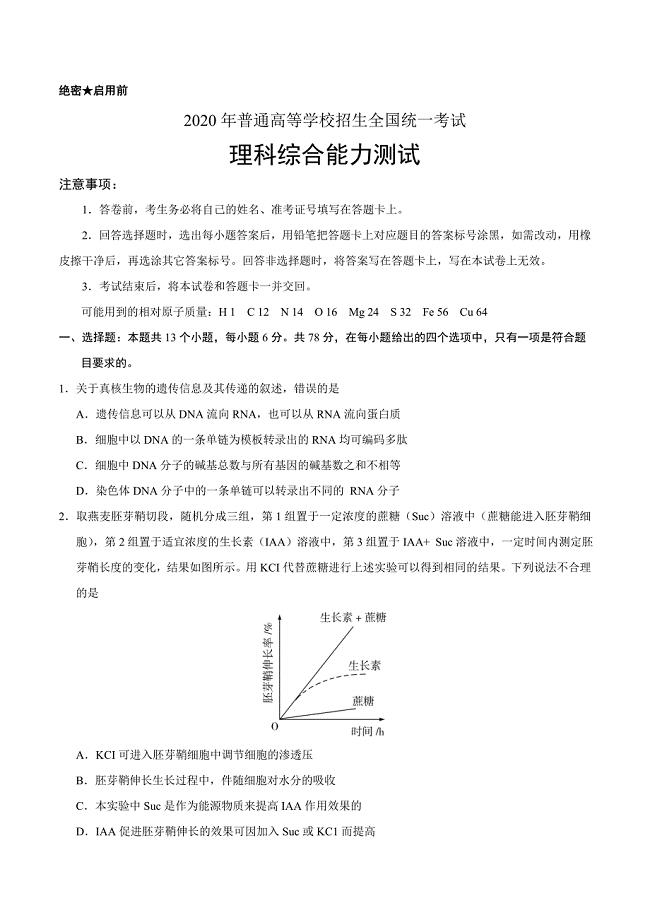
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 09.石油公司制度体系诊断及优化咨询项目
09.石油公司制度体系诊断及优化咨询项目
2024-04-08 33页
职工教育培训经费管理办法(规模生产制造业版)
2024-04-08 10页
08.圆通银行战略咨询项目
2024-04-08 25页
企业培训费管理实施暂行细则
2024-04-08 12页
职工教育培训经费管理办法(适合中小企业)
2024-04-08 10页
企业规章制度框架体系管理规定(2024修订版)
2024-04-08 21页
05.景宏集团全面管理提升咨询项目
2024-04-08 40页
07.玉兔食品集团供应链咨询项目
2024-04-08 34页
04.大华乳业业务战略咨询项目
2024-04-08 28页
06.德邦公司精益生产管理咨询项目
2024-04-08 28页