
自动控制原理第一章20150301
66页
1、1,自动控制原理,主 讲 韩 敏 E-mail: 助 课 许美玲,2,第一章 自动控制的基本概念(2学时) 控制系统导论,反馈控制系统的工作原理、分类方法、基本要求。,第二章 系统的数学模型(8学时) 控制系统数学模型,控制系统微分方程的建立及非线性方程的线性化。,第三章 时域分析 (8学时) 控制系统的时域分析法,典型输入信号,系统的性能指标,一阶系统的瞬态响应分析,系统稳定性分析。,3,第四章 根轨迹法 (8学时) 根轨迹法,根轨迹的基本概念,绘制根轨迹的基本规则。,第五章 频率响应法 (12 学时) 线性系统的频域分析,频率特性的概念,开环系统的幅相频率特性曲线。,第六章 控制系统的校正 (6学时) 线性系统的校正方法,校正与综合的概念,校正的基本方式,基本控制规律,常用校正装置及其特性。,4,第七章 非线性控制系统 (10学时) 非线性系统理论,非线性系统的特点、研究方法,典型非线性特性的数学描述及特性。,第八章 离散控制系统 (10学时) 线性离散控制系统,系统分类,采样过程的数学描述,采样定理,零阶保持器。,5,第一章 自动控制的基本概念 Chapter 1 The ba
2、sic concept of automatic control,1-1 概述 (Introduction) 1-2 自动控制的基本方式 (Basic mode) 1-3 自动控制的分类 (Classification) 1-4 自动控制系统的性能指标 (Performance index) 1-5 自动控制系统中的常用术语 (Common terms) 1-6 当前自动化学科的研究方向 (Research interests),6,1-1 概述 (Introduction),自动控制原理:自动控制技术的基础理论,自动控制:是指在无人直接参与的情况下,利用外加的设备或装置,使机器、设备或生产过程的某个工作状态或参数自动地按照预定的规律运行,控制装置或控制器,被控对象,被控量,给定量,7,自动控制系统(Automatic control system):是由控制器、被控对象等部件为了一定的目的有机地联接成一个进行自动控制的整体。,控制系统通常由软件平台+硬件系统构成,软件平台:上位机操作系统、数据库等 硬件系统:控制用计算机、检测机构等,控制系统的目标: 理论上满足静态特性,实际应用中动
3、静特性都要满足 系统要满足稳定性 系统要可靠,要有应用价值,8,日常生活中的自动控制,微波炉,自动售票机,空调,自动门,航天器太空仓空气控制系统,9,使导弹与目标间距离h(t)逐渐减小并趋于零。,军事中的自动控制,导弹的控制,10,航天中的自动控制,神舟飞船,11,工业中的自动控制,最先进的加工中心,12,工业中的自动控制,龙门刨床,13,工业中的自动控制,电动汽车,14,控制论(Cybernetics)是怎样形成的自动化发展简史,15,随着生产的发展,控制技术也在不断地发展,尤其是计算机的更新换代,更加推动了控制理论不断地向前发展。控制理论的发展过程一般可分为三个阶段:,控制论是怎样形成的自动化发展简史,20世纪之前,科学家的早期探索,第一阶段。20世纪初60年代,称为“经典控制理论”时期。,第二阶段。20世纪6070年代,称为“现代控制理论”时期。,第三阶段。20世纪70年代末至今。向着“大系统理论”和“智能控制”方向发展。,16,我国北宋时期(10861089年)天文学家苏颂、韩公廉建造了水运仪象台 十七-十八世纪,动力装置成为研究重点,风车技术和蒸气机取得突破发展。 1679年
4、法国物理学家丹尼斯巴本制造了第一台蒸汽机的工作模型。 1698年托马斯塞维利、1712年托马斯纽科门制造了早期的工业蒸汽机 。 1750年,安得鲁. 米克尔为风车引入了“扇尾”传动装置,使风车自动地面向风。随后,威廉. 丘比特对其改进,使得风车能够自动调整传动速度。 1765年,俄国人普尔佐诺夫(I.Polzunov)发明了蒸汽锅炉水位调节器。,1、20世纪之前:科学家的早期探索,早期的蒸汽机工作效率太低,难以推广,17,要保持无论外界负载怎么变化,转速都要保持恒定,需要不断地随着外界负载的变化而相应地改变供气量的大小,如果靠人工去控制气门显然非常紧张和吃力。,问题:瓦特在发明了蒸汽机后,发现不变的供气量会使机器因为外界负荷的变换而产生转速的忽高忽低,外界负荷大了同样的供气量机器的转速就得下降,外界负荷小了同样的供气量机器的转速就要上升。,1、20世纪之前:科学家的早期探索,1760年1800年,詹姆斯.瓦特对蒸气机进行了彻底得改造,终于使其得到广泛的应用。,18,解决方法:1788年,瓦特研制成了蒸汽机离心式调速器,使它能够保持蒸汽机转速“恒定”。,蒸汽机离心式调速器,19,瓦特离心
《自动控制原理第一章20150301》由会员206****923分享,可在线阅读,更多相关《自动控制原理第一章20150301》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
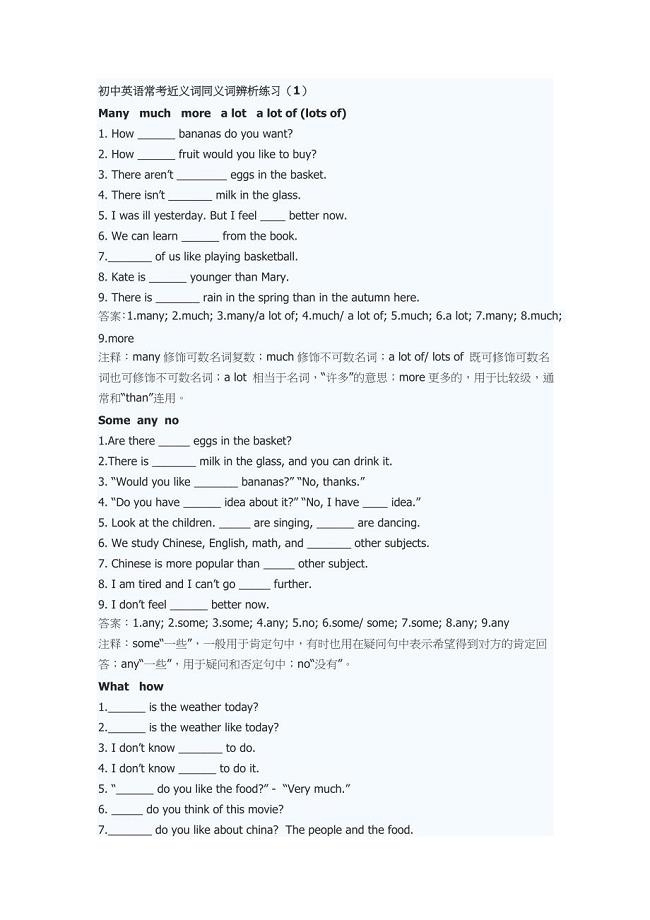
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
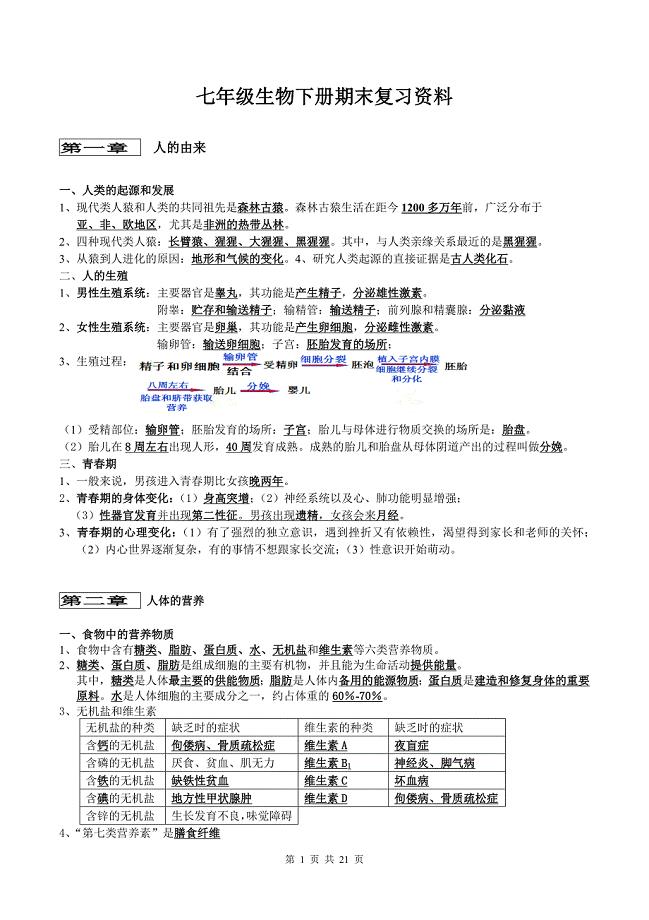
初中人教版七年级上册下册全册生物复习提纲21页 (1)
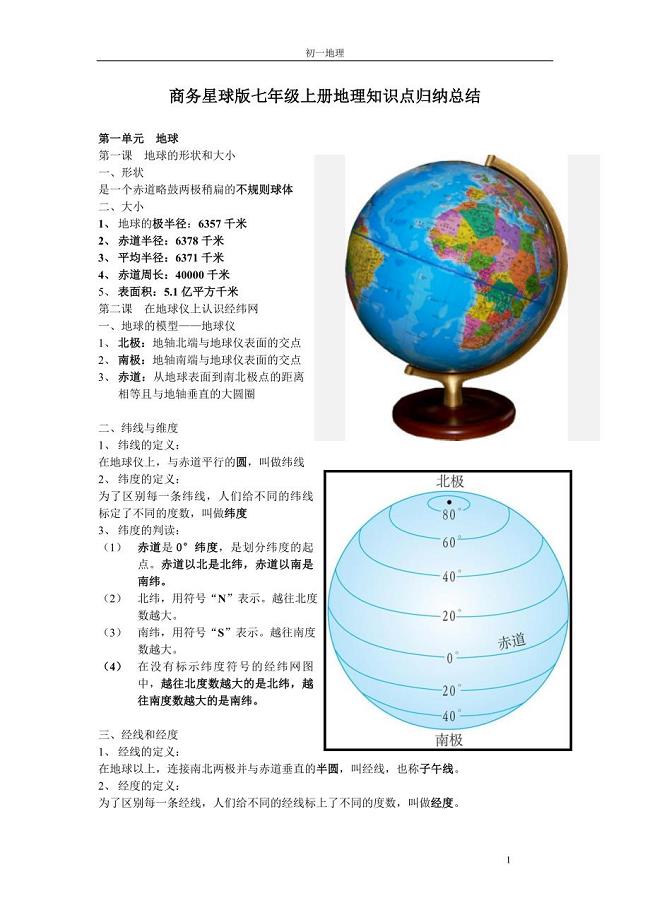
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 开学第一课安全教育-主题班会教育教学课件
开学第一课安全教育-主题班会教育教学课件
2024-04-09 29页
高中英语元宵节猜灯谜活动英文课件
2024-04-08 25页
部编版高一语文上册(必修一)《“探界者”钟扬》课件
2024-04-08 13页
部编版高一语文上册(必修一)《读书:目的和前提》课件
2024-04-08 17页
部编版高一语文上册(必修一)《喜看稻菽千重浪——记首届国家最高科技奖获得者袁隆平》课件
2024-04-08 17页
部编版高一语文上册(必修一)《立在地球边上放号》课件
2024-04-08 11页
部编版高一语文上册(必修一)《峨日朵雪峰之侧》课件
2024-04-08 14页
部编版高一语文上册(必修一)《沁园春长沙》课件
2024-04-08 17页
部编版高一语文上册(必修一)《拿来主义》课件
2024-04-08 15页
部编版高一语文上册(必修一)《红烛》课件
2024-04-08 16页