
盾构隧道监控量测技术--罗于恺
19页
1、盾构隧道监控量测技术 2010.03.20,第一部分 监控量测的目的及意义 第二部分 监控量测相关规范及要求 第三部分 监控量测具体措施及频率 (1)地面监测 (2)地表建/构筑物与地下管线沉降观测 (3)隧道隆陷及隧道收敛 (4)特殊管线监测点的设置 第四部分 盾构通过既有线的自动监测技术 第五部分 目前国内导向系统的分类 第六部分 简析盾构施工测量系统误差因素 第七部分 如何避免盾构施工测量系统误差的措施 第八部分 盾构隧道施工监控测量技术的前景,盾构隧道施工监控量测技术,第一部分 监控量测的目的及意义,监控量测的目的:是预测在施工过程中对地层的不同扰动程度,地层中的应力扰动区延伸及扩散,有可能引起地表、附近重要或高大建筑物产生沉降、隆起或倾斜,根据地表监测成果及时反馈信息指导和控制施工。同时为盾构机在掘进过程中正确调整技术参数提供信息,优化设计及施工参数,使隧道施工时达到优质、安全、经济合理、施工快捷的目的。 监控量测的意义是:使工程施工在可靠状态,满足设计及施工要求,使工施工过程中的地表允许隆陷值(10/-30mm),建筑物的不均匀沉降应小于有关规范的规定值。,第二部分 相关规
2、范及要求,施工过程中所有使用的仪器均应该满足设计及施工要求进行配置。 按照地下铁道、轻轨交通工程测量规范(GB50308-1999)对变形监测的要求,采用变形测量二等水准测量,高程中误差1.0mm,相邻点高差中误差0.5mm,环线闭合差0.6N1/2mm(注:变形点的高程中误差和点位中误差是对最近变形控制点而言,N为测站数)。 监测仪器要求:必须使用精密水准仪和铟钢尺,仪器精度不得大于0.1mm。在测量过程中,视距60m,前后视距差1.0m,前后视距累计差3.0m,当视线长度为20m以上时,视线高度0.5m,当视线长度为20m以下时,视线高度0.3m。,a.基点埋设 首先要进行基点的埋设,基点应埋设在隧道地表沉降影响范围以外的稳定区域内,埋设在视野开阔的地方以利于观测,同时应埋设多个基点(不得少于3个),以便基点互相校核。基点的埋设要牢固可靠,不易损坏,基点应和附近水准点联测取得原始高程。 b.测点埋设 根据施工段的围岩条件和周围建筑物情况来布置测点。一般地段,沿施工影响范围的中线方向每隔5米布设一个测点,每隔一定距离布设一个监测横断面。 横断面方向测点间隔,一般为58米,在一个监测面
3、内因设48个测点,地面顶突出5mm以内。 地面沉降测量应在施工影响开挖面附近,每天进行及每周进行后期的沉降观测,直到沉降稳定。当观测值变化较大时或应监理工程师要求应增加观测频率。具体如下表所示。,(1).地表监测,第三部分 盾构施工监测具体措施及频率,监测点布置形式,监测项目及频率表,a.建筑物监测 对在施工影响范围内的建/构筑物布置测点,测点一般布置在建筑物的四角或其它结构物周围基础上,对于大型建/构筑物的监测点加密布置。 根据建筑物情况及重要程度,在每栋建筑物上面至少每一个角设置一个观测点,以测量其位移、倾斜等。 对于重要建筑物应采用自动记录仪和警报装置进行监测控制。 b.地下管线监测 在施工影响范围内的地下管线沿长度方向每5m布施一个监测点。其余各项参照“地面建筑物监测”条款执行。监测方法与地面监测相同。 c.施测方法及控制 建筑物变形测量应在施工开挖面附近每天进行及每周进行后期观测直到沉降稳定,当观测值变化较大时或应监理工程师要求应增加观测频率。,(2).地表建/构筑物与地下管线沉降观测,盾构隧道掘进过程中,尽管采用了先进的盾构机施工,由于受盾构推力、注浆、隧道线形等影响,隧道
4、管片产生不同程度的位移,因此必须对隧道管片隆陷、隧道收敛等情况进行严格的监测和控制。 1)隧道隆陷量测 方法与地表沉降量测方法相同。在始发掘进、正常掘进过程中定期进行数据回归分析:未脱出盾尾脱出盾尾后备套内脱出后备套范围的一整套监测变形数据分析。 2)隧道收敛量测 采用收敛计进行隧道收敛监测。及时做出时间收敛值及开挖面距离位移散点图,对各量测断面内的测线进行回归分析,并用收敛量测结果判断隧道的稳定性。如果收敛值过大,应对周围岩体或土体进行加固处理;改变开挖方法或修改掘进参数。,(3).隧道隆陷及隧道收敛,施工影响范围内的所有管线监测严格按“地面建筑物监测”有关条款执行。 当地下管线密集地段时,监测测点布置根据地下管线与隧道的相对位置关系确定。一般情况下按照地下管线长度方向每5米布施一个监测点,监测点将布置在管线垂直正上方。 针对较为特殊的管线根据设计及业主的要求进行,条件允许的情况下可将管线挖出实施直接观测,同时对较为危险的管线实施提前加固处理观测其变形规律。,(4). 特殊管线监测点的设置,a.监测仪器设备及监测精度的要求 以徕卡全站仪TCA2003(精度:0.5”,1mm+1ppm
《盾构隧道监控量测技术--罗于恺》由会员第***分享,可在线阅读,更多相关《盾构隧道监控量测技术--罗于恺》请在金锄头文库上搜索。
校园足球汇报
异甘草酸镁注射液【治疗急性药物性肝损伤】Ⅱ期临床研究总结
云教室课程行政伦理学行政良心

语文S版小学二年级语文下册诺亚方舟课件优质课教学课件
未来中考趋势作文考与练
近年来广东历史试题中考易错点分析与教学启示

搜索推广那些事

小学语文二年级上册红领巾真好说课稿设计(说课设计)

新课标人教版二年级语文上册红领巾真好课件

新课程背景下的高中化学课堂教学改革

危机管理与突发事件应对

背影朱自清教案课件二课时
突发公共卫生事件培训
统计学简史及数据科学中南财经大学

水泥混凝土路面技术现状及发展终
有家真好作文讲评课
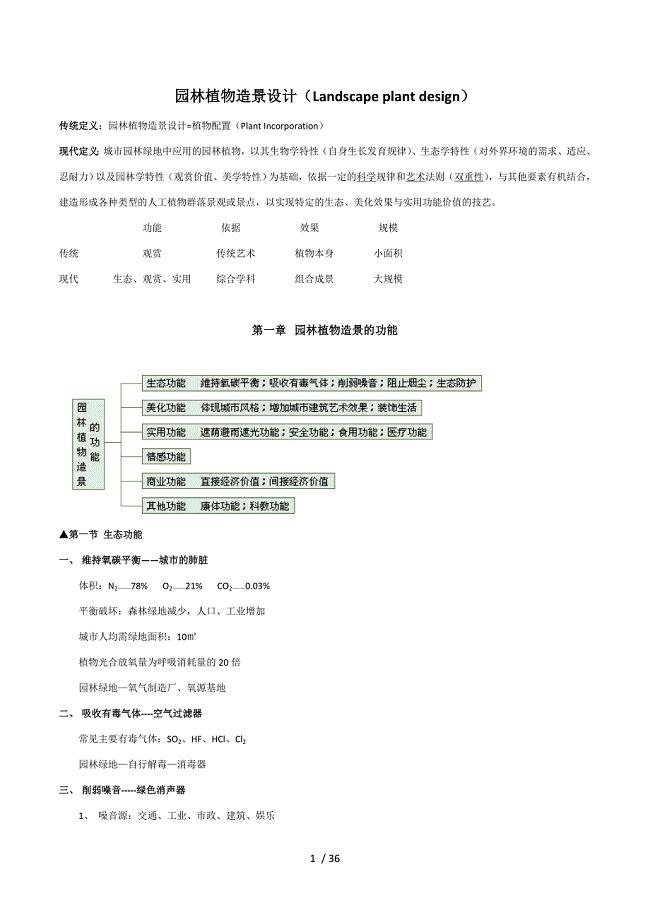
西南大学植物造景设计总复习
海外汉语教学新探索在线交流学习平台Goclef

动态黑色背景年终总结模板
孙子的治军之道与现代管理谋略总结
 商务管理理念、商务策划、签证索赔管理讲解
商务管理理念、商务策划、签证索赔管理讲解
2024-02-20 60页
综合体消防施工管控要点
2024-02-20 80页
《工贸企业有限空间作业安全规定》全面解读课件
2024-02-20 57页
起重吊装及安装拆卸工程专家论证
2024-02-20 192页
FTTH施工质量项目部管控要点
2024-02-20 67页
节前隐患排查治理
2024-02-20 57页
企业领导者安全生产管理履职清单PPT
2024-02-09 43页
车间划线及标准讲解
2024-02-09 30页
基坑基础施工技术及管控要点
2024-02-09 48页
高层钢结构施工安全管控要点
2024-02-09 18页