
摄影测量后方交会VC实现代码及实习报告
9页
1、遥感信息工程学院 09031班 2009302590123 吴煜晖摄影测量课间实习单片空间后方交会班级:09031姓名:吴煜晖学号:20093025901232011-10-8一、实习原理单像空间后方交会的基本思想是:以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标测值出发,根据共线条件方程,解求该影像在航空摄影时刻的外方位元素XS,YS,ZS,。由于空间后方交会所采用的数学模型共线方程是非线性函数,为了便于外方位元素的解求,须首先对共线方程进行线性化,然后进行后方交会,最后在精度评定。二、实习过程1、实习所用数据本次实习数据采用课本P.44 27题所给数据。如下图:2、程序流程图及界面设计本程序程序框图如下:输入原始数据归算像点坐标x,y计算和确定初值XS0,YS0,ZS0,0,0,0组成旋转矩阵计算(x),(y)和lx,ly逐点组成误差方程式并法化所有点完否?解法方程,求未知数改正数计算改正后的外方位元素未知数改正数限差否?整理并输出计算结果正常结束迭代次数小于限差否?输出中间结果和出错信息非正常结束本人采用Visual C+6.0编此程序,利用M
2、FC来设计程序。主程序页面设计如下:子窗口(即进行计算后所得结果页面)设计如下:3、程序代码本程序代码较多,在此讲部分重要代码列出,其余代码参见程序源代码。对话框类头文件内声明的类成员及函数(后来增加的):public:void houfangjiaohui();double fi,w,k; /影像外方位角double Xs0,Ys0,Zs0; /后方交会所求解double a3,b3,c3;double mx6,m0;void inv(double *a,int n);/*正定矩阵求逆*/void transpose(double *m1, double *m2, int m, int n); /矩阵转置void mult(double *m1, double *m2, double *result, int i_1, int j_12, int j_2);/矩阵相乘部分核心代码,在此讲后方交会计算代码给出:void CFinalworkDlg:houfangjiaohui()double t_fk;fi=w=k=0.0;int i; /中间变量double t_x4,t_y4,t_
《摄影测量后方交会VC实现代码及实习报告》由会员壹****1分享,可在线阅读,更多相关《摄影测量后方交会VC实现代码及实习报告》请在金锄头文库上搜索。
2022秋季小学教务工作计划
县招商局工作计划
有子有女离婚协议书样本(三篇).doc
北京中医药大学21春《内科护理学》在线作业二满分答案_28
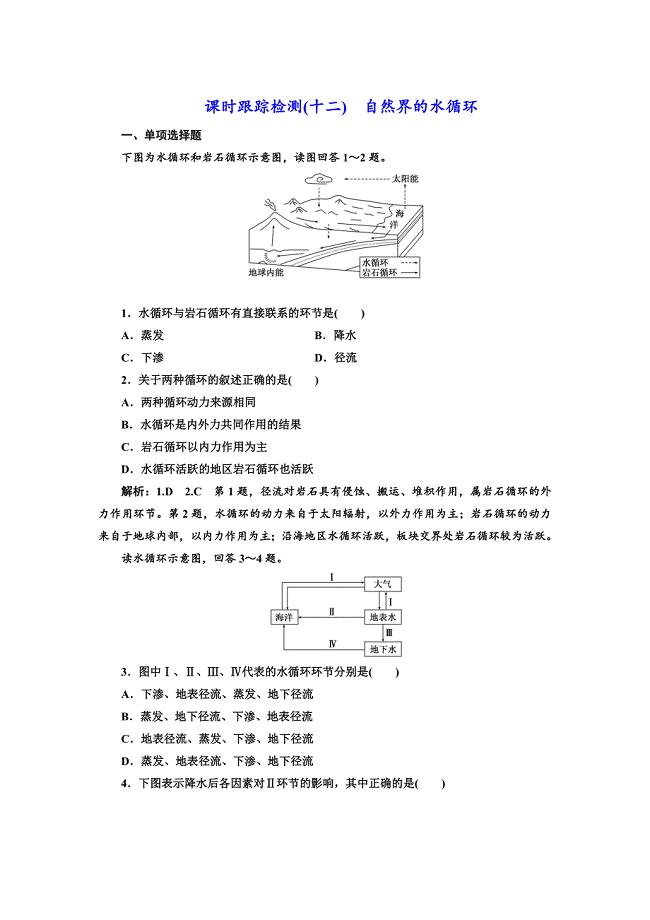
高中新创新一轮复习地理江苏专版:课时跟踪检测十二 自然界的水循环 Word版含解析
愚人岛旅游概念规划详细说明hlzd
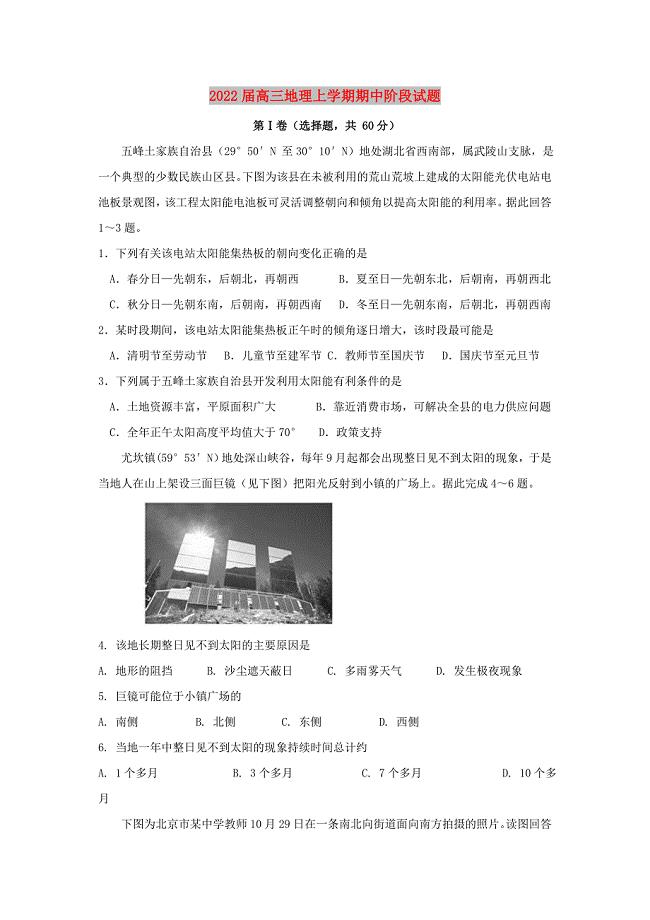
2022届高三地理上学期期中阶段试题
年级主任个人述职报告4篇
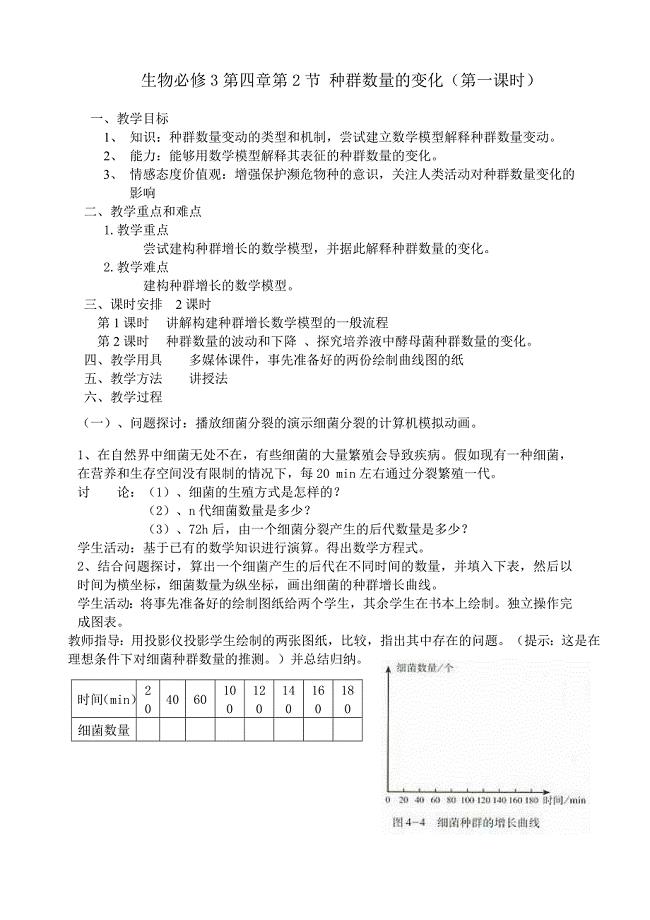
必修3第四章第二节种群数量的变化(教学设计)MicrosoftWord文档

深入开展“公与私、对与错、荣与辱界限”专题大讨论活动
【课件】企业薪酬变革决策及方案设计【可编辑范本】
2014年山东科技计划项目
幼儿园后勤工作计划通用15篇
工程师2014工作总结及2015年计划
2013年最新CETE工作总结
高档绣花窗帘面料建设项目商业计划书写作模板
RFID智能仓库管理系统方案共20页
芜湖电子纸技术创新项目投资计划书模板范文
2023年福建省南平市顺昌县双溪街道余坊村社区工作人员考试模拟题含答案
2023年06月四川乐山市金口河区事业单位招考聘用急需紧缺专业人才13人笔试参考题库附答案详解
 《运动控制系统》
《运动控制系统》
2023-02-10 18页
广告脚本+镜头脚本
2023-05-26 2页
HDPE土工膜污水处理工程中的施工方案
2023-03-08 8页
钢支撑施工方案
2023-01-11 18页
屋面防水细部做法
2023-09-02 6页
愚人岛旅游概念规划详细说明hlzd
2023-01-05 22页
脚手架工程施工方法
2022-09-28 3页
MG-250320型筒式钢球磨煤机施工工法文档下载-MGqba
2023-05-12 8页
实验室质量控制管理制度
2022-07-24 3页
更改用户登录和注销方式图解
2023-07-20 11页