
步进电机与伺服电机的区别
5页
1、步进电机开环步进电机(开环)步进电机是将电脉冲信号转变为角位移的开环控制电机,应用极为广泛。不超载的情况下,电机的转速和停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机是一种感应电机,它的工作原理是利用电子电路,即驱动器,将直流电变成分时供电的多相时序控制电流。步进电机虽然由直流电流供电,但是不能理解为直流电机,直流电机是将直流电能转换为机械能的动力电机,而步进电机是将电脉冲信号转变为角位移的开环控制电机。步进电机步进伺服对比注意步进电机应用于低速场合-每分钟转速不超过1000r/min,最佳工作区间是150500r/min,(闭环步进可达1500)。贰相步进电机在6070r/min容易出现低速共振现象,产生振动和噪音,需要通过改变减速比、增加细分数、添加磁性阻尼器等方式避免。细分精度注意事项,当细分等级大于4后,
2、步距角的精度不能保证,精度要求高,最好换用相数更多(即步距角更小)的步进电机或闭环步进、伺服电机。(开环)步进电机与伺服电机的7不同:A控制精度伺服电机控制精度可以根据编码器设置,精度更高;B低频特性步进电机低频容易振动,伺服电机不会;C矩频特性步进电机随转速提高力矩变小,所以其最高工作转速一般在1000r/min,伺服电机在额定转速内(一般3000r/min)内都能输出额定力矩,在额定转速以上为恒功率输出,最高转速可达5000 r/min;D过载能力步进电机不能过载,伺服电机最大力矩可过载3倍;E运行性能步进电机为开环控制,伺服电机时闭环控制;F速度响应步进电机启动时间0.150.5s,伺服电机0.050.1,最快可0.01s达到 额定3000r/min;G效率指标步进电机效率约60%,伺服电机约80%;实际使用中会发现:伺服电机贵,贵出很多,所以同步电机应用更广泛,特别是在定位精度要求不是很高的同步带传动、平带输送机等场合经常使用步进电机。步进电机闭环步进电机:除了开环步进电机,还有在电机尾部添加了编码器,可以实现闭环控制的步进电机。步进电动机的闭环控制是采用位置反馈和(或)速度反
《步进电机与伺服电机的区别》由会员枫**分享,可在线阅读,更多相关《步进电机与伺服电机的区别》请在金锄头文库上搜索。
安全生产监管工作联动制度样本(2篇).doc
房租租赁合同
银行业务人员年终工作总结.doc
学校工作计划2023完整(三篇).doc
班主任德育工作总结简单标准样本(二篇).doc
委托快繁苗木协议书(二篇).doc
动物之间爱的故事
2022年教师培训的个人学习心得体会
珍惜时间的日记12篇
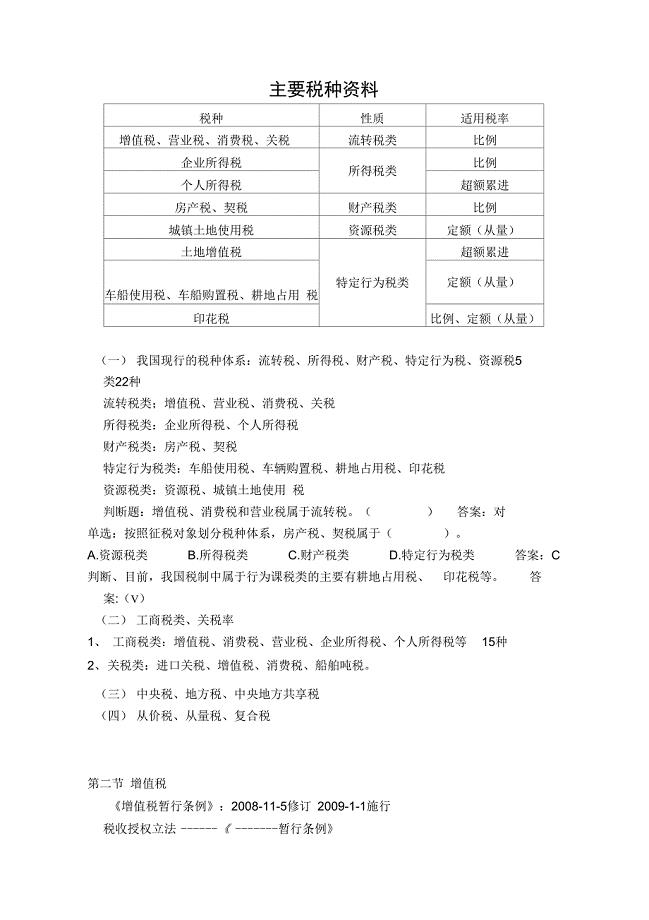
主要税种资料
2022工程技术员年终工作总结
儿科护理年度工作计划(九篇).doc
感恩演讲稿优秀例文
新人教版五年级下册音乐教案全册(DOC 42页)
冬天的黄山高一作文
西方经济学形考任务
股份转让协议书范本三
小学语文教研组教学计划范文通用6篇
中职机械班主任管理工作论文
孟德尔豌豆杂交实验说课稿
 吉林省四平市《政治理论及党务知识测试》事业招聘考试
吉林省四平市《政治理论及党务知识测试》事业招聘考试
2022-09-29 36页
医院进修自 我鉴定 (2)
2022-10-27 19页
河南省2017年中考数学试题(有答案)
2023-02-16 17页
云南省楚雄彝族自治州《护理基础知识》医学
2023-12-02 37页
广东省东莞市《教育学与教学法基础知识》教师教育招聘考试
2023-09-13 38页
广东省东莞市《通用能力测试(教育类)》教师教育招聘考试
2023-04-19 37页
医院工作流程
2023-09-19 69页
高中生物教学渗透生命教育研究课题开题报告.doc
2023-01-26 6页
广东省湛江市《教育公共基础笔试》教师教育招聘考试
2023-07-07 38页
医院迁建全年工作情况报告
2022-10-30 20页