
毕业设计(论文)-工业机械手液压及PLC控制系统设计
51页
1、成都理工大学工程技术学院毕业论文工业机械手液压及PLC控制系统设计作者姓名:专业名称:机械工程及自动化指导教师: 成都理工大学工程技术学院学位论文诚信承诺书本人慎重承诺和声明:1.本人已认真学习学位论文作假行为处理办法(中华人民共和国教育部第34号令)、成都理工大学工程技术学院学位论文作假行为处理实施细则(试行)(成理工教发201330号)文件并已知晓教育部、学院对论文作假行为处理的有关规定,知晓论文作假可能导致作假者被取消学位申请资格、注销学位证书、开除学籍甚至被追究法律责任等后果。2.本人已认真学习成都理工大学工程技术学院毕业设计指导手册,已知晓学院对论文撰写的内容和格式要求。3.本人所提交的学位论文(题目:工业机械手液压及PLC控制系统设计 ),是在指导教师指导下独立完成,本人对该论文的真实性、原创性负责。若论文按有关程序调查后被认定存在作假行为,本人自行承担相应的后果。承诺人(学生签名): 20 年 月 日 注:学位论文指向我校申请学士学位所提交的本科学生毕业实习报告、毕业论文和毕业设计报告。1工业机械手液压及PLC控制系统设计摘要在当代工业的发展,各种自动化技术日益成熟,机械
2、手是属于自动化技术中的一种,机械手也是当代的一项新课题。机械手是自动化生产中不可或缺的设备,他在工业中的应用越来越多。本论文为自动化生产线上设计一台PLC控制液压系统机械手。采用圆柱坐标的形式机构,通过PLC控制液压系统来完成。它工作一个来回需要用时45s,因为要保证机械手的运动精度,我们采用了导向杆导向和花键轴导向;还需要保证机械手的定位精度,我们采用行程开关来控制。本文主要叙述了机械手的设计计算过程 。首先,本文了介绍机械手的简介及运用和工业机械手的发展趋势,说明了机械手的位置检测和机械手圆柱座标的形式。其次再进行了机械手的总体方案设计,及机械手的各组成部分设计,主要写了各部分驱动力的计算。最后进行了液压系统及PLC控制系统的设计。文章中介绍了PLC控制系统液压传动机械手的设计理论与方法。简略的讨论了机械手的手部、腕部、手臂、液压系统、PLC控制系统等主要部件的结构设计。关键词:工业机械手 液压系统 PLCAbstractIn the development of modern industry, all kinds of automation technology matures
3、, manipulator is one of the automation technology, and is a new subject of contemporary manipulator.Manipulator is indispensable in the production of automation equipment, his application in the industry more and more.In this paper for the automated production line design a manipulator PLC control hydraulic system.In the form of cylindrical coordinate mechanism, through the PLC control hydraulic system to accomplish.It work a need is 45 s back and forth, because to ensure the movement precision
4、of the manipulator, we adopted the guide rod guide and spline shaft orientation;You also need to ensure the accuracy of the manipulator positioning, we travel switch is used to control.This paper mainly describes the design and calculation process of the manipulator. First, this paper introduces the introduction and application of the manipulator and the development trend of industrial robots, illustrates the position detection of the manipulator and the manipulator in the form of cylindrical co
《毕业设计(论文)-工业机械手液压及PLC控制系统设计》由会员ni****g分享,可在线阅读,更多相关《毕业设计(论文)-工业机械手液压及PLC控制系统设计》请在金锄头文库上搜索。
语文教研活动的总结范本
电磁线胶圈项目商业计划书写作模板-代写定制
在职研究生毕业个人鉴定
赵州桥shuoke
航程置业工程档案案卷名称表
2023年01月2022江苏盐城市卫生健康委部分直属事业单位第二批招聘专业技术人员参加人员名册(本科岗位)历年参考题库答案解析
室内装饰设计通用版合同书
五年级语文下册教案——《最大的麦穗》教学反思
房屋租赁合同通用版3

2023年05月四川省成都市青白江区四所“两自一包”公办学校招考聘用教师笔试题库含答案解析
人教版小学语文一年级上册教案-《一去二三里》_教学设计六-小学一年级教案
渠道混凝土衬砌施工方案
2022年医院房屋租赁合同范本
商住楼-基坑安全专项施工方案fung
小学四年级班务工作计划(6篇).doc

江西卷英语答案解析
街道办事处小区建设和小区服务情况汇报

溶气气浮一体机说明
氧化还原反应
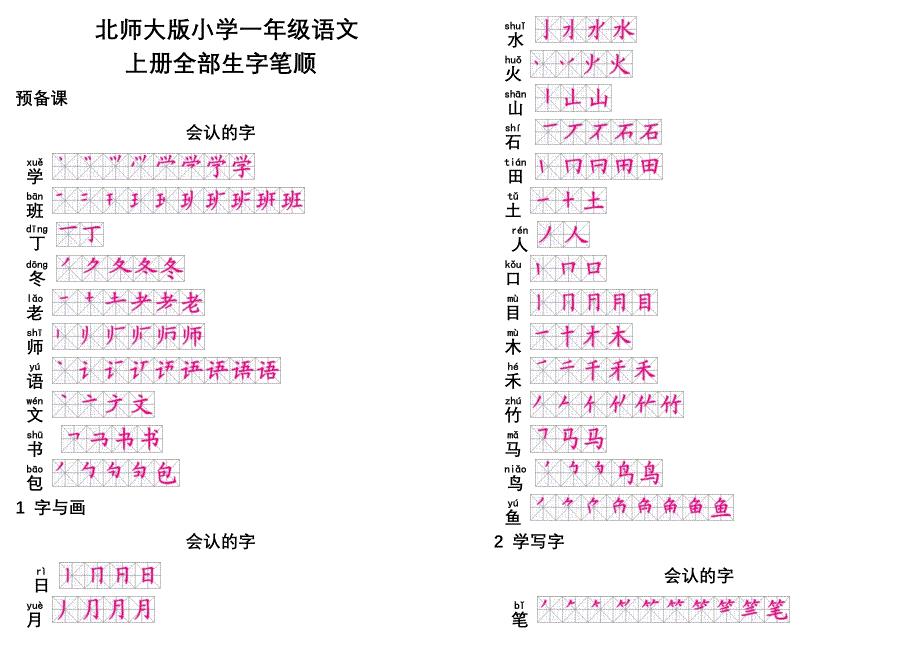
整理北师大版小学一年级语文上册生字笔顺
 公司投资圣诞节日礼品产业化项目可行性研究报告
公司投资圣诞节日礼品产业化项目可行性研究报告
2023-02-11 64页
学前教育科研方法平时作业及答案
2023-04-12 13页
热力系统改造竣工验收报告
2023-10-07 23页
华泽自动阀门类技术规范
2023-12-31 10页
安全生产应急预案(专家评审过的)(DOC 41页)
2023-02-17 41页
质量体系的财务考虑(质量成本)
2023-01-02 3页
大口桶盖塑料成型课程设计说明书(含装配图)(精品)
2022-10-19 27页
机房建设实施方案详细版
2023-10-10 72页
pep新人教三年级英语上册第一单元检测题
2022-07-19 2页
小学各学段阅读书目
2022-11-14 9页