
毕业设计(论文)玻璃清洁机器人吸附机构设计
33页
1、中国地质大学江城学院毕业设计(论文)分类号 密级 U D C 中国地质大学江城学院毕业论文(设计)玻璃清洁机器人吸附机构设计姓 名: 专 业: 机械设计制造及其自动化 班 级: 25201102 学 号: 2520110218 指导教师: 论文外文题目: 玻璃清洁机器人吸附机构设计 论文主题词: 玻璃清洁机器人 复合吸附方式 螺旋桨式轴流风机 外文主题词: lass-wall cleaning robot Combined suction method Propeller type axial flow fan 论文答辩日期: 答辩委员会主席: 评阅教师: 原创性声明本人呈交的学位论文,是在导师的指导下,独立进行研究工作所取得的成果,所有数据、图片资料真实可靠。尽我所知,除文中已经注明引用的内容外,本学位论文的研究成果不包含他人享有著作权的内容。对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确的方式标明。本学位论文的知识产权归属于培养单位。本人签名: 日期: 摘 要玻璃幕墙清洁机器人是具有特定功能的壁面移动机器人,是特种机器人的一个分支。它不仅可以用于高层建筑外表面幕
2、墙的清洗,还可用于特殊环境或者特殊设备的表面清洗以及检查。它是基于壁面移动机器人技术,并针对具体的作业对象研发具有明确功能的实用型机器人。其主要工作在高层建筑的玻璃幕墙表面,克服重力对自身的作用,携带清洗作业设备对建筑物玻璃幕墙表面进行清洗,从而将人们从危险的高空作业环境中解脱出来,不仅可以避免发生意外事故,而且可以提高清洗效率、节约成本,具有可观的市场前景。本文将在分析玻璃清洁机器人常见的吸附方式,以及国内外对玻璃清洁机器人所开发的新型吸附方式后,提出采用螺旋桨式轴流风机产生负压作为作为吸附方式的经济适用型吸附机构。在对机器人整体设计方案进行介绍,提出模块化的组装结构。在这基础上,对机器人的吸附机构进行设计分析,然后应用相关理论和设计软件进行参数设计和部件的结构设计,验证吸附机构。最后利用Pro/ENGINEER创建出所设计的玻璃清洁机器人吸附机构三维实体模型以及机器人整体模型。 关键词:玻璃清洁机器人 复合吸附方式 螺旋桨式轴流风机AbstractGlass-curtain-wall-cleaning robot is a wall climbing robot with spec
3、ial functions, with is a branch of special robot. It not only can be used for cleaning the outer surface of the curtain wall of high-rise buildings, can also be used for surface cleaning and checking of special circumstances and special objects. It is a practical robot based on technology of the wall-climbing robot and having a clear function for specific research and development of the robot. Its main function is to overcome the effects of gravity on their own with cleaning equipment for cleani
4、ng in the glass-curtain wall-cleaning surface of high-rise buildings so that it can free people from dangers of aerial working environment, thus avoiding accidents, improving the efficiency of cleaning and saving costs. It has a considerable market prospect. In this paper, analysis of glass cleaning robots popular method of adsorption, as well as adsorption to glass cleaning robots developed by the new approach, using propeller-type axial-flow fan to create negative pressure as the economic appl
《毕业设计(论文)玻璃清洁机器人吸附机构设计》由会员cl****1分享,可在线阅读,更多相关《毕业设计(论文)玻璃清洁机器人吸附机构设计》请在金锄头文库上搜索。
《枫叶如丹》教学实录

2018-2019学年九年级英语全册Unit2Ithinkthatmooncakesaredelicious自我复习与检测新版人教新目标版
专家讲高考报志愿:学会估相对分
精修版高考化学高效巩固提升练习【第7单元】水溶液中的离子平衡含解析
2023年江苏省徐州市新沂市双塘镇刘庄村社区工作人员考试模拟试题及答案

汽车机电购销合同范本

自愿离婚协议书样本
2017年股权激励协议书范本
pep 小学英语四年级下册单词竞赛
欢度六一儿童节作文600字【五篇】
农业采摘园项目建议书写作模板立项审批
2023年审计部工作制度3篇
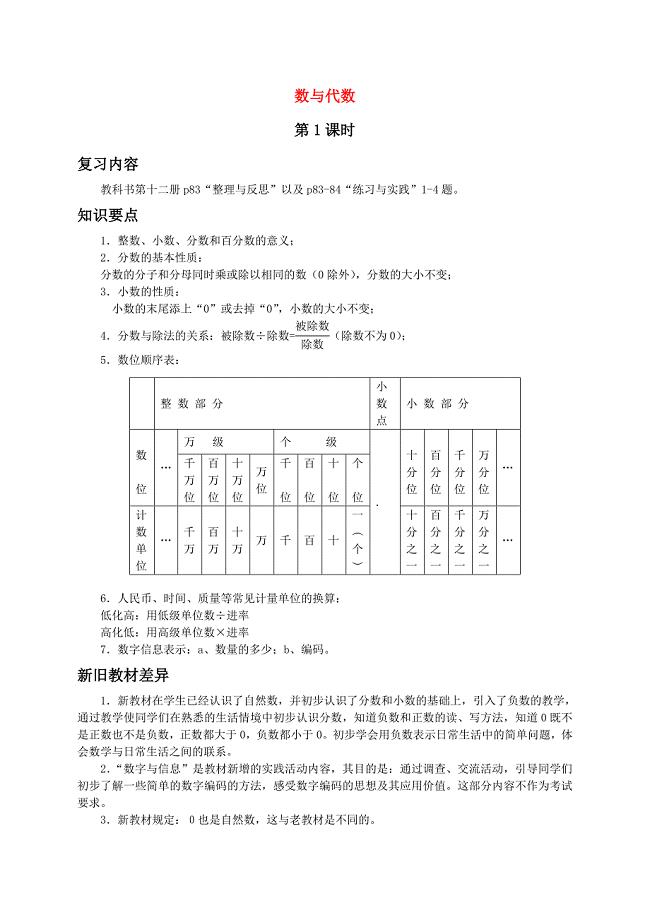
六年级数学下册 数与代数(一)复习教案 苏教版
个人工作计划共7篇
2013年秋八年级英语上册_Unit_1_Where_did_you_go_on_vacation导学案1
舒惠好:博士,中国会计准则委员会咨询专家,中国财
02-绩效考核管理工具KPI绩效考核方案_模板
数控编程后处理的系统格式修改
大班结构游戏活动教案热闹的马路
电子商务专业毕业实习报告范文
 新课标初中作文指导:让作文语言更有文采
新课标初中作文指导:让作文语言更有文采
2023-12-04 3页
2023年不抱怨的世界读书心得(15篇)
2023-08-28 29页
2023年新学期学习计划模板15篇
2024-03-07 25页
【精品文档】XXX国际旅行社分社加盟协议书
2023-02-28 4页
(精编)学生会宣传部部长竞选演讲稿2
2023-06-28 28页
高一生物教学工作计划范文锦集8篇
2023-11-13 21页
2023建筑装饰装修工程合同
2023-09-03 63页
精选感谢老师感谢信3篇
2023-09-15 6页
稳健性原则与其他会计原则的冲突与对策
2023-08-24 41页
[doc]质量管理制度
2023-05-03 11页