
鲁棒控制及其发展概述(共13页)
13页
1、精选优质文档-倾情为你奉上鲁棒控制及其发展概述摘要本文首先介绍了鲁棒控制理论的发展过程;接下来主要介绍了研究鲁棒多变量控制过程中两种常用的分析方法:方法以及分析方法;最后给出了鲁棒控制理论的应用及其控制方法,不仅仅用在工业控制中,它被广泛运用在经济控制、社会管理等很多领域。随着人们对于控制效果要求的不断提高,系统的鲁棒性会越来越多地被人们所重视,从而使这一理论得到更快的发展。并且指出了目前鲁棒控制尚未解决的问题以及研究的热点问题。关键词:鲁棒控制;鲁棒多变量控制;鲁棒控制;分析方法一、引言鲁棒控制(Robust Control)方面的研究始于20世纪50年代。在过去的20年中,鲁棒控制一直是国际自控界的研究热点。以闭环系统的鲁棒性作为目标设计得到的固定控制器称为鲁棒控制器。 控制系统的鲁棒性研究是现代控制理论研究中一个非常活跃的领域,鲁棒控制问题最早出现在上个世纪人们对于微分方程的研究中。最早给出鲁棒控制问题的解的是Black在1927年给出的关于真空开关放大器的设计,他首次提出采用反馈设计和回路高增益的方法来处理振控管特信各大范围波动。之后,Nyquist频域稳定性准则和Black回
2、路高增益概念共同构成了Bode的经典之著1中关于鲁棒控制设计的基础。20世纪60年代之前这段时间可称为经典灵敏度设计时期。此间问题多集中于SISO系统,根据稳定性、灵敏度的降低和噪声等性能准则来进行回路设计。20世纪六七十年代中鲁棒控制只是将SISO系统的灵敏度分析结果向MIMO进行了初步的推广2,灵敏度设计问题包括跟踪灵敏度、 性能灵敏度和特征值 /特征向量灵敏度等的设计。20世纪80年代,鲁棒设计进入了新的发展时期,此间研究的目的是寻求适应大范围不确定性分析的理论和方法。二、正文1. 鲁棒控制理论 方法在工程中应用最多,它以输出灵敏度函数的范数作为性能指标,旨在可能发生“最坏扰动”的情况下,使系统的误差在无穷范数意义下达到极小,从而将干扰问题转化为求解使闭环系统稳定并使相应的范数指标极小化的输出反馈控制问题。 鲁棒控制理论是在空间(即Hardy 空间)通过某些性能指标的无穷范数优化而获得具有鲁棒性能的控制器的一种控制理论。空间是在开右半平面解析且有界的矩阵函数空间,其范数定义为: (1)即矩阵函数在开右半平面的最大奇异值的上界。范数的物理意义是指系统获得的最大能量增益3。鲁棒控制理
3、论的实质是为MIMO(多输入多输出)且具有模型摄动和不确定性的系统提供了一种频域的鲁棒控制器设计方法。鲁棒控制理论很好地解决了常规频域理论不适合的MIMO系统设计及LQG(线性二次高斯)理论不适合的模型摄动情况两个难题,其计算的复杂性随着计算机技术的发展及标准软件开发工具箱的出现而得到克服,近年来已成为控制理论的一个热点研究领域,并取得了大量实际的应用成果。1.1 鲁棒控制理论的发展过程控制理论是20世纪80年代开始兴起的一门新的现代控制理论。控制理论是为了改变近代控制理论过于数学化的倾向以适应工程实际的需要而诞生的,其设计思想的真髓是对系统的频域特性进行整形(Loopshaping),而这种通过调整系统频率域特性来获得预期特性的方法,正是工程技术人员所熟悉的技术手段,也是经典控制理论的根本。 1981年Zames首次用明确的数学语言描述了优化控制理论,他提出用传递函数阵的范数来记述优化指标。1984年加拿大学者Fracis和Zames用古典的函数插值理论提出了设计问题的最初解法,同时基于算子理论等现代数学工具,这种解法很快被推广到一般的多变量系统,而英国学者Glover则将设计问题归
4、纳为函数逼近问题,并用Hankel算子理论给出这个问题的解析解。Glover的解法被Doyle在状态空间上进行了整理并归纳为控制问题,至此控制理论体系已初步形成。 在这一阶段提出了设计问题的解法,所用的数学工具非常繁琐,并不像问题本身那样具有明确的工程意义。直到1988年Doyle等人在全美控制年会上发表了著名的DGKF论文,证明了设计问题的解可以通过适当的代数Riccati方程得到。DGKF的论文标志着控制理论的成熟。迄今为止, 设计方法主要是DGKF等人的解法。不仅如此,这些设计理论的开发者还同美国的The Math Works公司合作,开发了MATLAB中鲁棒控制软件工具箱(Robust Control Toolbox),使控制理论真正成为实用的工程设计理论。1.2 鲁棒控制理论研究(1)线性控制研究。从耗散性能理论和微分对策理论出发,利用增益分析,非线性控制问题可解决的充分条件被转化一组Hamilton-Jacobi等式或不等式的可解性问题,并可通过求解来获得鲁棒控制器的形式6-8。Takagi Sugeno 提出了著名的T-S模糊系统模型,为非线性控制系统提供了新的思路。吴忠
《鲁棒控制及其发展概述(共13页)》由会员工****分享,可在线阅读,更多相关《鲁棒控制及其发展概述(共13页)》请在金锄头文库上搜索。
2023年大学生实习工作总结(4篇).doc
三年级上册语文素材第一单元知识点 人教版
人工挖孔桩施工组织设计
新外研版英语九年级上课文
实用新型专利申请书示例(带图)
湖北汉江师范学院2022年招聘102名工作人员冲刺卷第十一期(附答案与详解)
2015下半年教师资格考试幼儿园《保教知识与能力》真题及答案Word版
简短的个人工作总结参考范本(2篇).doc
热搜词属性词核心词促销词宝贝标题
彩电通用故障诊断检修思路16930
多功能提取罐URS
建设废旧电池收集储存项目建议书写作模板立项备案审批
初中化学酸碱盐笔记
裁员协商解除劳动合同
八年级英语下册作业规划
2018年家庭医生团队服务年终工作总结
卫生院安全生产月活动总结(2篇).doc
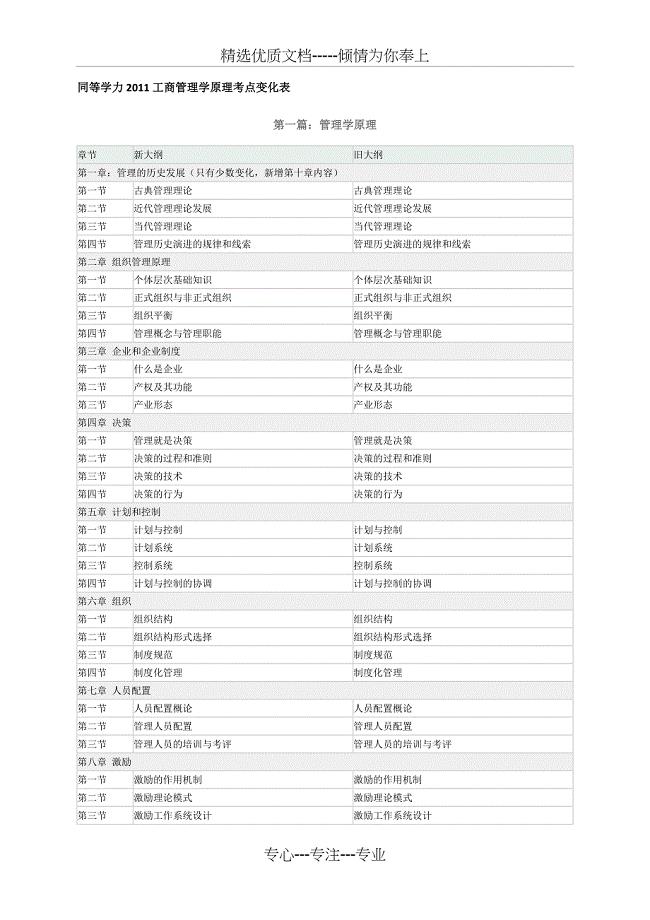
同等学力2011工商管理考点变化表
流水一居项目管理课程设计
业务员年度工作计划标准范本
 外研版小学英语(三起)四年级上册Module9达标测试题
外研版小学英语(三起)四年级上册Module9达标测试题
2023-07-08 6页
建筑施工企业分包业务的财税处理分析
2022-09-03 10页
BCD-550WT间冷式家用冰箱制冷系统设计
2023-01-25 24页
(完整版)海底世界教案
2024-01-26 6页
厦门休闲食品项目可行性研究报告
2024-01-12 109页
同等学力2011工商管理考点变化表
2023-11-29 4页
工程竣工结算指导办法
2023-01-18 7页
师德主题教育活动总结精选
2024-02-05 8页
小学英语期末复习方法浅谈
2024-01-01 8页
建筑工程施工现场安全管理资料全套样本
2023-11-21 126页