
稳定边界法测PID参数PID
6页
1、实验一 PID 参数整定(稳态边界法)一、实验目的1、了解PID调节原理,P、I、D对被控系统调节过程的影响2、利用Simulink工具箱对PID参数进行整定二、实验设备安装Mat lab 6.0 (以上版本)PC计算机一台三、实验原理和步骤(一)实验原理1 、 PID 控制参数PID 调节的动作规律是u (t) = K e (t) + 丄e (t )dt + T(式 1-1)p _Ti oD dt _式1-1中,Kp为比例系数;Ti为积分时间常数;TD为微分时间常数;u(t) 为控制器输出;e(t)为控制器输入。2、 PID 参数 Kp、 Ti 、 TD 对控制过程的影响(1) 比例系数Kp。增大Kp,比例带减小,加快系统的响应速度,有利于 减小残差,但不能消除残差。 Kp 过大会使系统产生超调,振荡次数增多,调 节时间长,影响系统的稳定性。(2) 积分时间常数Ti。增大Ti,可减小超调,减小振荡,使系统稳定,消 除残差。(3) 微分时间常数TD。加入TD调节,可改善系统动态特性,减小超调量, 缩短调节时间。微分时间过大或过小都会影响超调量,只有适当的微 分时间常数才能获得满意的调节
2、过程。微分作用使得系统对扰动变敏 感。(4)(二)实验内容1、过程控制系统常用的PID调节器传递函数为G(s) = K + 匚 + K s (式 1-2)psD式 1-2 中, Kp, Ki, KD 分别是比例系数、积分系数、微分系数2、某被控对象为二阶惯性环节,其传递函数为:1(5 s + 1)(2 s + 1);测量装置和调节阀的特性为:G (s) =1,G (s) = 1。现采用稳定边界法整定PIDm10 s + 1 v参数:1)在 Matlab 的 Simulink 工具箱里,搭建系统方框图,如下所示(2) 为得到响应曲线的将仿真环境中的“ Stop Time”设置为60, “Relative tolerance ”设置为 1e-5(3) 未整定PID参数前,在比例系数Kp=1的调节下,被控系统的输出曲线是:(4) 利用稳定边界法整定PID三个参数。先选取较大的Kp,例如100,使系统 出现不稳定的增幅振荡,然后采取折半取中的方法寻找临界增益,例如第一个点 是Kp=50,如果仍未增幅振荡则选取下一点Kp=25,否则选取Kp=75。直到出现 等幅振荡为止。请截出相应的响应曲线图形选取的 Kp=12.5(5)按照稳定边界法计算PID参数。稳定边界法的计算公式如表1所示。调节规律KpKiKdP0.5KpPI0.455Kp0. 535Kp/TPID0.6Kp1.2Kp/T0.075Kp*TT 大概取 15.2根据表 1,计算得 Kp=7.500,Ki=0.9868, Kd= 14.25006)然后回到 Simulink 环境下,设置三个参数为计算数值,得阶跃响应曲线:思考题:1、分析使用稳态边界法得到的响应曲线的动态偏差,调节时间和余差性能指标。 使用稳态边界法得到的相应曲线调节可以消除余差,调节时间大概为 45s 左右,不算 长, 但是它的超调量确是比较大的。2、如何微调 PID 三个参数,改善响应曲线过渡过程动态偏差过大的问题。 我们可以把Ki适当减少,即增大积分时间常数,减弱积分作用,我将Ki改成了 0,4, 此时的曲线为:明显曲线的超调量减少了,调节时间也减少了一些。
《稳定边界法测PID参数PID》由会员ni****g分享,可在线阅读,更多相关《稳定边界法测PID参数PID》请在金锄头文库上搜索。
邵阳关于成立锂技术创新公司可行性报告_模板范文
高中数学第二册上含绝对值的不等式
小学三年级教师计划(2篇).doc
电气毕业实习报告六篇
福建师范大学21春《小学语文教学论》离线作业2参考答案93
益阳关于成立智能家居公司可行性报告
牛津英语一年级第二学期单词卡片
名师工作室两年工作计划
姚安县前沿材料项目创业计划书(范文模板)
幼儿园中班教师资格证面试优质教案教学设计:变色龙
全国高考英语真题名师制作优质教学资料

在应聘副总经理大会上的演讲aa
幼儿园工作年度计划范本(三篇).doc
七年级人教版生物上册第一单元第一章第一节导学案
二年级语文集体备课计划
塑胶件的价格的计算
职业教育中心顶岗实习计划
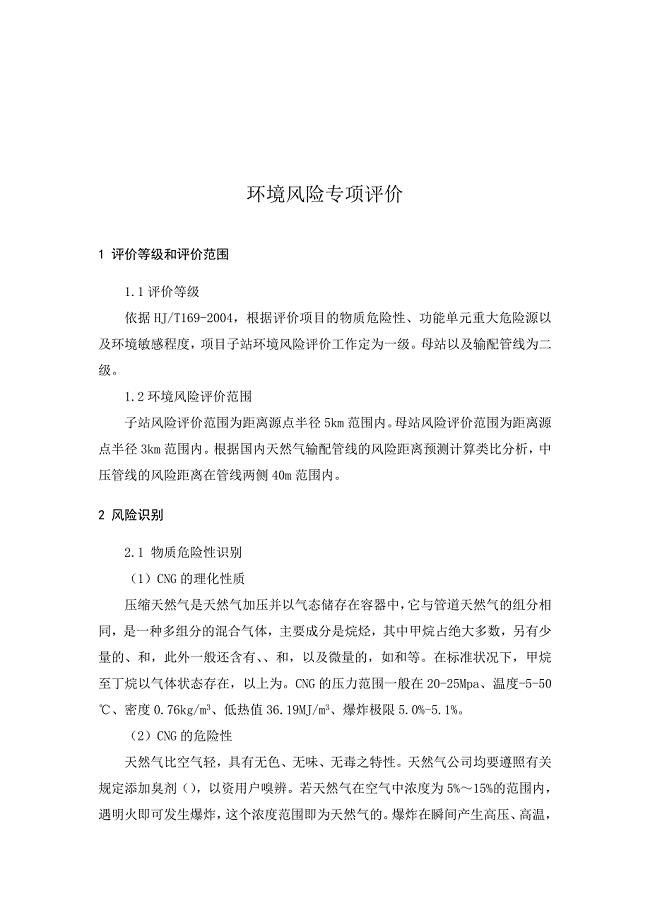
环境风险评价等级与评价范围
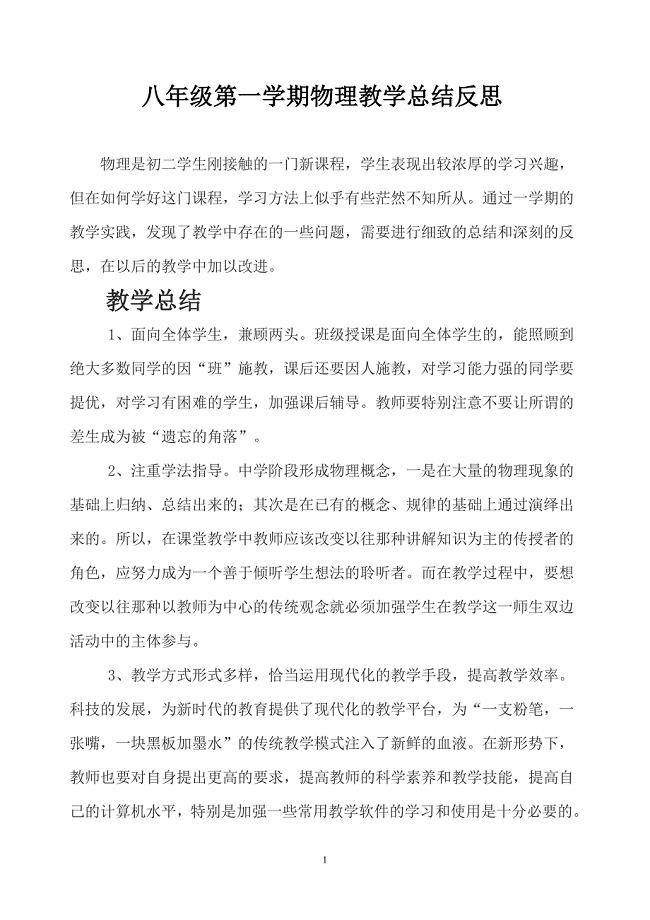
八年级第一学期物理教学反思
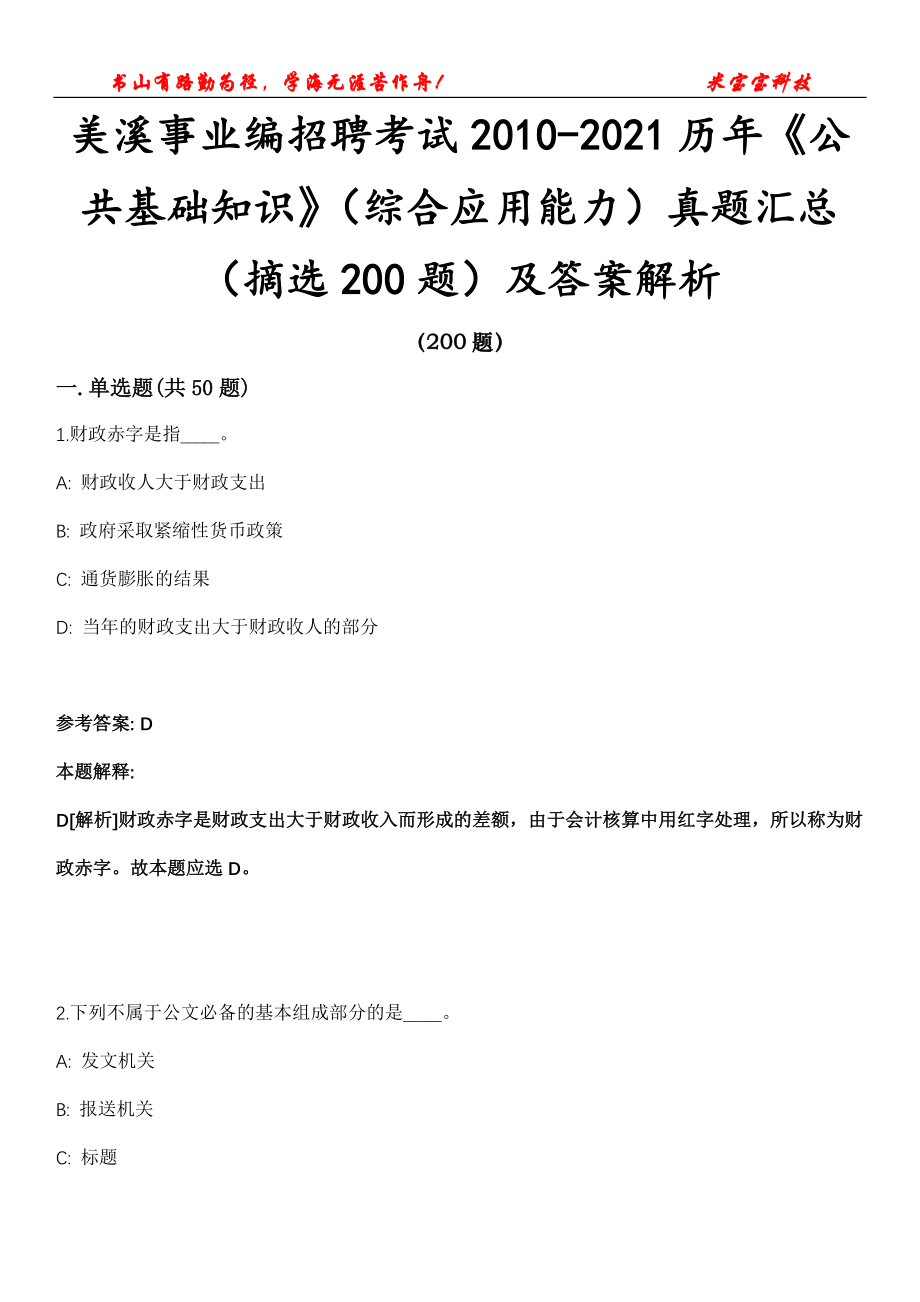
美溪事业编招聘考试2010-2021历年《公共基础知识》(综合应用能力)真题汇总(摘选200题)及答案解析_0
 大卖场谈判技巧
大卖场谈判技巧
2023-09-25 7页
食品安全监督抽检合格样品检验信息汇总表
2024-02-04 30页
幼儿园老师教育笔记《我不想小便》
2023-03-18 3页
三级公路毕业设计
2023-04-23 47页
开放专科《建筑结构》复习答疑
2023-10-17 7页
《中级财务会计教案》第七章 无形资产
2023-04-21 9页
水电安装施工方案
2023-02-23 45页
2020年(岗位职责)施工现场专业人员工作职责
2024-01-11 8页
园林景观工程施工方案正式版
2022-11-01 39页
水源热泵在温室加温中的应用
2022-08-08 10页