
三自由度并联机器人机构设计开题报告
3页
1、开 题 报 告毕业设计(论文)题目三自由度并联机器人机构设计题目类型工程设计(项目)论文类作品设计类其他一、 选题简介、意义传统的教师活动中心管理方式,积累量大,易出错,在教师活动中心开放方面,教师很难查看教师活动中心的空闲时段,管理员也很难为教师预备实验条件。在选择实验课方面,总是以班级或者专业为单位进行排课,使得教学缺乏自主化,人性化,而且往往会师生之间相互不了解而产生的盲目教学等情况,影响教师、老师的积极性,从而影响实验教学的效果。所以,需要开发一套开放教师活动中心实验预约系统来代替传统的管理方法。开放教师活动中心预约系统包含管理员放课子系统,老师排课子系统,教师选课子系统三块。在放课子系统中,管理员根据该学期的实际需要发放本学期的实验项目批次,同时管理员可以统计所有实验项目批次的选课情况。在排课子系统中,老师根据管理员发放的实验项目批次,确定实验的时间、地点、容纳人数等基本信息,同时老师可以查看自己排课情况。在选课子系统中,教师根据自己的实际情况和老师排课的基本情况来选择自己的实验项目批次,同时教师可以查询老师的信息,课程的信息和自己的课表。系统采用B/S架构,符合操作简单,界
2、面友好,灵活,实用,安全的要求,能够完成开放教师活动中心预约管理的全过程。系统的最大特点就是打破了传统意义上的教师活动中心管理方式,使得教师、老师在整个教学过程中更加自主,不断提高了两者的积极性,同时也提高了教与学的质量,提高了实验教学管理的效率。二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)1. 课题研究及主要研究内容三自由度并联机器人是一种多变量和本质非线性的复杂系统,其运动学及 动力学分析是并联机器人的机构设计以及液压驱动系统设计的前提。本文首先 采用坐标变换和求导的方法对三自由度并联机器人运动学进行了分析;然后不 考虑折页、液压缸的质量和惯量,基于牛顿-欧拉法建立了系统的单刚体动力学模型;本文还在运动学分析和动力学分析的基础上设计了系统的动力机构,并给出了系统动力机构在基本工况下的负载匹配曲线; 三自由度并联机器人另外一个重要的研究方向是三自由度并联机器人控制 策略的研究,控制系统将直接决定系统最终达到的性能指标。本文首先推导了 对称阀控制非对称缸的传递函数数学表达式;然后设计了简单的PID调节控制 器,对控制系统的特性进行了初步分析。
《三自由度并联机器人机构设计开题报告》由会员博****1分享,可在线阅读,更多相关《三自由度并联机器人机构设计开题报告》请在金锄头文库上搜索。
我们爱吃的水果
施工认识实习报告3篇
一年级看图写拼音
2022年考博英语-西安交通大学考前模拟强化练习题23(附答案详解)
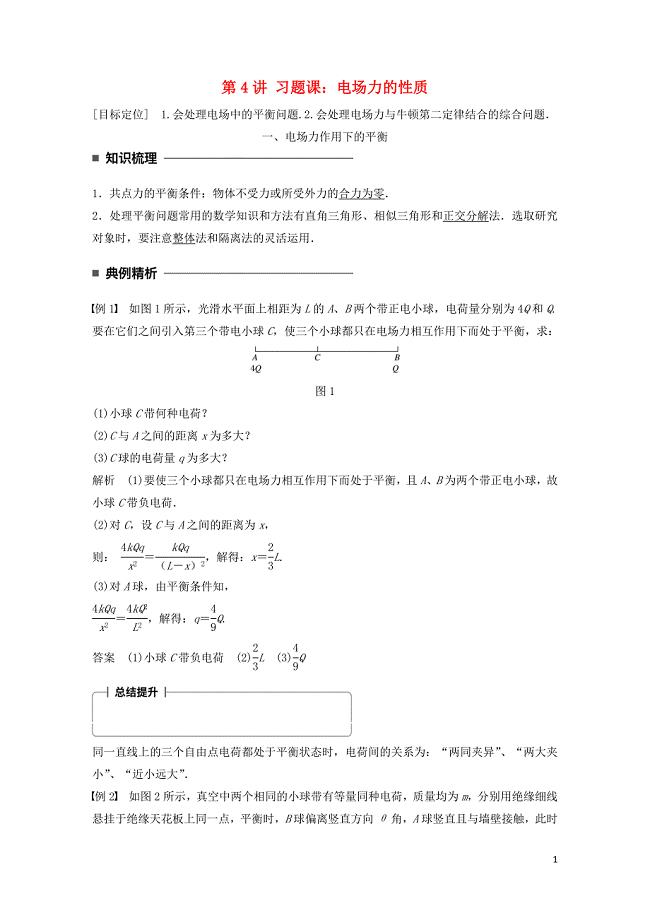
高中物理第一章静电场第4讲习题课:电场力的性质学案教科版选修3106
服装设计师求职信
城市污水厂设计计算书
工作报告之扬尘治理自查报告
2023公司员工上半年工作总结范本(4篇).doc
【精华】销售公司工作总结三篇
昌乐县第三小学校2018-2019学年二年级下学期数学3月月考试卷
2021寒假社会实践心得体会模板九篇
三国演义读书笔记精选15篇
2023年四川省资阳市安岳县横庙乡丰岩村社区工作人员考试模拟题及答案
一年级语文上册写字表看拼音写词语
2022社区环境调查报告
中学生禁毒演讲稿
办公用品节约管理制度
3G校园推广方案
江苏省徐州市铜山区八年级地理上册 2.1中国的地形教案1 新版湘教版
 电气EDA课程设计-基于VHDL的电子秒表的设计
电气EDA课程设计-基于VHDL的电子秒表的设计
2023-05-16 21页
毕业设计(论文)-宜昌某石墨矿地下开采设计
2023-11-24 47页
毕业设计(论文)开题报告-高空固定缆道除垢清理装置设计
2024-01-03 20页
机械毕业设计(论文)-茶水过滤网塑料模具设计(全套图纸)
2023-11-10 33页
人民币汇率波动对中国家电行业出口的影响研究
2023-08-22 18页
毕业设计(论文)-自动铝罐粉碎机的结构设计
2023-09-11 21页
毕业设计开题报告-原位自生TiBwTi60钛基复合材料摩擦磨损性能研究
2022-07-30 5页
机械毕业设计(论文)-阀体加工工艺及夹具设计(全套图纸)
2023-04-09 41页
农村信息化发展现状及对策思考
2024-02-07 3页
毕业设计(论文)-直线电机驱动数控锡膏喷印机结构设计
2022-11-16 52页