
毕业设计(论文)开题报告-高空固定缆道除垢清理装置设计
20页
1、太原理工大学现代科技学院 开题报告 太原理工大学现代科技学院毕业设计(论文)开题报告题 目: 高空固定缆道除垢,清理装置设计 专业班级: 机电2班 姓 名: 学 号: 指导教师: 2015年 4月 8日1.课题名称: 高空固定缆道除垢,清理设置计设2.课题研究背景20世纪70年代,随着水文系统技术新活动的开展,水文测验设施,设备去得很大的进步,水文缆道测流被逐渐推广,成为最主要测流方法之一,不同跨度、跨数、手动、电动的水文测流缆道在水文测站广泛使用,代替了测船、缆车及其他测流方式。由于水文测流缆道设在野外,极易锈损,特别是随着近年来酸雨的增多,给缆道运行带来极大安全隐患,;缆索加油保养成为了保护缆索的关键。水文缆道测验规范(SL443-2009):中养护涂油部分规定:“主索应每1年,工作索每年不应少于2次”。但据调查,在实际工作中,多次水文测站队缆索每年上油保养一年一次火两年一次,甚至长期不保养,导致在洪水测报中出现缆索损断事故。3.课题研究意义:(1)提高了缆道使用寿命(2)提高了缆道维护的效率(3)解决了人工清洁带来的安全和清洁质量不稳定问题(4)降低了缆道清理的人工成本4.文献查
2、阅概况:高空固定缆道除垢,清理装置设计董建,董立丰,刘津轩摘要: 缆道测流方法是最广泛、最成熟的测流方法。水文测验缆道作为水文测报工作中重要的基本设施之一,随着水文现代化的发展,原始的手摇缆道逐渐实现了自动化,但是测试缆道架高空缆索保养仍靠人工实现,危险性大、作业难度大、遥控自动除垢加油的研制成功,实现了除垢与加油自动同步进行,提高了缆索保养的效率和质量,延长了缆索的使用寿命。5.设计(论文)的主要内容和方案:自动除垢加油器运行时动力依赖内置的电机, 可以通过无线接收装置控制电机的启动、关闭及其正反转, 从而实现操作人员只需在地面操作遥控器控制电机的运行, 达到遥控加油器的目的。具体流程见图示:根据应用现场的实际需求确定主要性能和参数指标如下:(1)操作简便, 节省人力。(2)传统的架空缆索保养, 无论是缆索落地或悬空人力操作, 都要投入大量的人力, 如跨度在400m 左右的缆索需要56 个人同时紧张工作一天。(3)使用自动除垢加油器只需12 人3 h 内完成, 同步完成除垢加油。(4) 主要技术参数指标如表图26.缆道清理装置使用注意事项:通过对缆道除垢方面进行大量调研和分析, 总结
3、得出要研制出能成功并且适合高空作业的除垢装置, 必须考虑以下几方面的工况情况:(1)保证遥控器和无线接收器能在操作运行的范围之内(2)如何加热黄油,保证黄油的温度达到最佳涂到缆道上(3)选用什么样的电机来驱动清理装置保证稳点效率工作(4)根据缆道的直径来选取配套的刮垢齿跟换使用7.方案的设计思和总体思路想:7.1.1遥控器的工作原理图发射机单元主要是由编码模块级发射频模块所组成.当按下发射机上的按钮或扳动开关时,编码模块即可繁殖哪个按钮,是在1速或2速位置?并将此按键之数据结合识别码及汉明码给与编码成数控数据后传至发射机频模块之调变器用以调变射频载波,调变器输出的调频信号再经频放大器放大,地通滤波器滤波后送到无线发生发射信号.7.1.2单片机的红外遥控器解码电路图解码器硬件以AT89C51 单片机为核心, 如图5 所示,图中只给出接收红外遥控信号的部分电路。红外遥控信号经过红外接收模块接收后, 解调为遥控信号的编码脉冲由输出端A 输出, 其波形如图3 和图4 所示, 此信号经过反相器74LS04 输出到AT 89C51 的外部中断INT0 输入端。单片机通过运行程序对面外遥控器TC90
4、21 所发出的编码脉冲进行接收和译码。7.1.3单片机程序设计单片机程序主要解决的问题就是如何对接收到的9021 型红外遥控器所发射的信号进行解码, 编码脉冲信号是由引导码、用户码、和功能码等部分组成, 我们只对获取其功能码过程进行分析。在单片机设置中, 将单片机AT89C51 内部定时器/计数器T 0 设为定时方式1 , 定时时间为1 ms ;设外部中断INT 0 为下降沿中断触发方式, 由于在接收时将编码脉冲信号进行反相, 因此, 每当INT0外管脚信号下降沿到来时, 外部中断INT 0 发生中断, 启动定时器T0 , 定时器每次中断定时时间为1 ms 并累加到定时计数器中, 在下一次外部中断INT 0 发生中断时读取定时计数器中的时间, 通过对两个脉冲之间的定时时间的析来对遥控器功能码进行解码如图7.2信号接收器的工作原理本设计中采用PHILIPS公司LPC2000系列ARM处理器为核心, 实现了与绝对式编码器的通信、译码、显示等功能.在接收器内部有控制模块(用于向绝对式编码器发送控制信号)、时钟模块(用于向绝对式编码器发送同步时钟信号)、接收模块(用于接收绝对式编码器发送的数据
《毕业设计(论文)开题报告-高空固定缆道除垢清理装置设计》由会员hs****ma分享,可在线阅读,更多相关《毕业设计(论文)开题报告-高空固定缆道除垢清理装置设计》请在金锄头文库上搜索。
现代物流概论培训
苗木订购合同常用版(6篇).doc

关于交通局加强安全考核总结范文
希望杯数学能力培训教程
员工个人学习成长计划标准范本(二篇).doc

幼儿园教师教育随笔《面对多事孩子的家长》
新闻媒体部最美瞬间项目策划书

高中英语-选修8-词汇表(人教版)
(可行性报告商业计划书)某油脂厂污水处理方案
会计处理方法在纳税筹划中的运用
22春《社区服务》综合作业一答案参考14
工法编写技巧
2021-2022年一年级数学上册 11~20各数的认识教学建议 人教版
小学数学骨干教师个人总结

海天酒店电梯安装施工方案【实用文档】doc
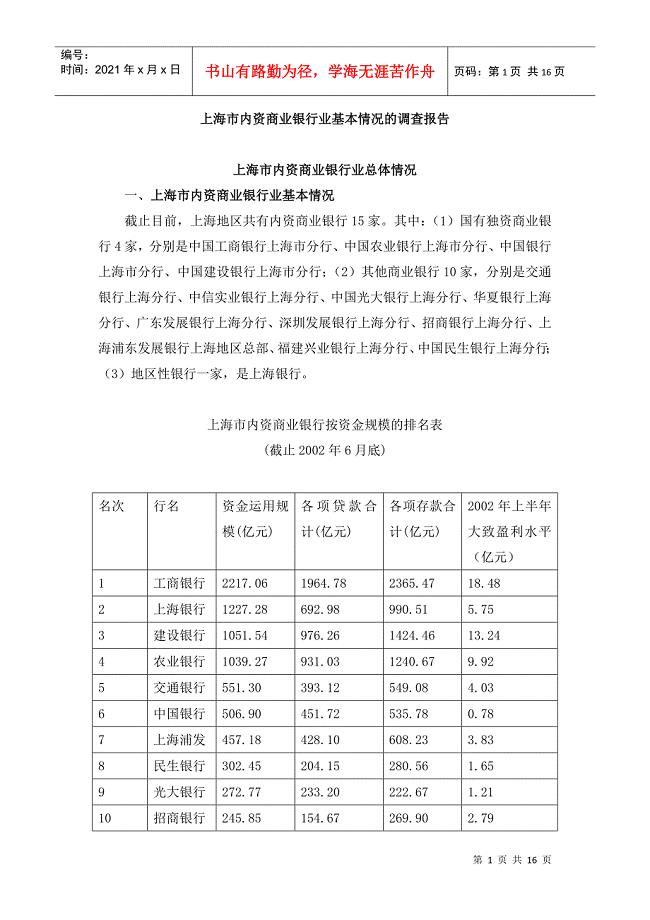
上海市内资商业银行业基本情况调查报告
新版山东省淄博市高三第三次模拟考试数学理试题及答案
成本管理资料
放射科2023年工作计划标准范本(3篇).doc
楚雄州关于成立坚果公司可行性研究报告
 金融行业所得税对金融市场的影响分析 会计学专业
金融行业所得税对金融市场的影响分析 会计学专业
2023-07-07 9页
毕业设计(论文)-X射线C型臂系统结构设计(全套图纸三维)
2023-05-07 21页
毕业设计(论文)-多功能两用遮阳伞设计
2023-04-10 52页
城管社会评议整改方案
2022-10-19 10页
三维动画设计课设报告
2023-09-30 9页
械毕业设计(论文)-动力输出总成的设计【全套图纸】
2023-02-28 41页
机械毕业设计(论文)-自动抹灰机设计(全套图纸三维)
2023-09-21 32页
毕业设计(论文)-壳体零件加工工艺及夹具设计(全套图纸三维)
2024-01-07 33页
不同编码和调制方式对OFDM系统性能影响的仿真分析
2023-12-03 35页
交通信号灯控制系统的设计
2023-01-27 22页