
苗间锄草机器人设计及优化设计论文
39页
1、毕业设计题 目苗间锄草机器人设计及优化设计学生姓名学 号系 部专 业班 级指导教师二一五年X月摘要随着农业生产的快速发展,农业生产技术急需发展,各种人工的生产已经不能满足需要。除草机器人的研究,这其中机器人机械臂的运动学分析和图像识别又是比较关键的技术,以及除草方法的不断改进更使效率大大提高。相信随着我国对对农业机器人的高度重视,我国在农业除草机器人的研究领域会取得重大的突破。我国的农业生产能力家大大提高。本文设计一款苗间锄草机器人,其包括机器人行走机构、无线功能模块、除草机构、电源模块、视觉模块等组成。本苗间锄草机器人利用其视觉处理模块可实现全自动自行移动除草工作,同时利用其无线功能模块可实现遥控除草工作。除草机构可上线摆动工作,适应不同的工况。本文首先确认除草机器人方案,完成关键部件设计计算,然后利用三维SOLIDWORKS完成苗间锄草机器人的三维建模,并导出二维工程图,最后利用SOLIDWORKS对苗间锄草机器人进行运动仿真。关键词:苗间锄草机器人,行走机构,视觉模块,运动仿真,三维建模AbstractWith the rapid development of agricultu
2、ral production, agricultural production technology need development, all kinds of artificial production has been unable to meet the needs. Study on weeding robot, the kinematics analysis and recognition robot manipulator is the key technology, continuous improvement and weeding method more improve the efficiency. I believe that with the country attaches great importance to the agricultural robot, in our country agricultural weeding robot research field will make breakthroughs. Chinas agricultura
3、l production capacity greatly increased home.The design of a weeding robot in this paper, including the robot, wireless module, power supply module, weeding mechanism, visual module etc. The weeding robot using the visual processing module can realize the automatic self moving weeding work, while using its wireless remote control module can realize the function of weeding. Weeding mechanism can work on-line swing, adapt to different working conditions. This paper first confirms the weeding robot
4、 program, complete the key components of the design calculation, 3D modeling and 3D SOLIDWORKS to complete the weeding robot, and the output of engineering drawing, finally using SOLIDWORKS motion simulation for weeding robot.Keywords: weeding robot, walking mechanism, vision module, motion simulation, 3D modeling目录摘要iAbstractii第一章 引言51.1 课题研究的目的及意义51.1.1课题研究的目的51.1.2 课题研究的意义51.2苗间锄草机器人国内外的现状51.2.1国内的研究现状51.2.2国外研究现状61.3 国内外可移动机器人的发展现状61.4 移动机器人的关键技术71.5 课题设计思路91.6 课题设计结构9第二章 苗间锄草机器人的总体设计方案102.1
《苗间锄草机器人设计及优化设计论文》由会员汽***分享,可在线阅读,更多相关《苗间锄草机器人设计及优化设计论文》请在金锄头文库上搜索。
2021年关于保险岗内培训心得体会范文【5篇】

精选类山东省菏泽市定陶县陈集镇中学七年级生物下册6.1人体的免疫功能导学案无答案新版济南版
2022年注册安全工程师考试生产技术全考点题库附答案参考75
软件工程报告—小型图书管理系统
【】电大土木工程本科《工程经济与管理》考试资料小抄
教师岗位练兵个人工作报告
项目开篇报告(创意大本营小组初稿)
大数据关键技术
![认识分数复习课教学设计及反思[精选文档]](https://union.152files.goldhoe.com/2022-9/16/ef87f292-c9d9-4da5-b04a-8ad96cc1caa0/pic1.jpg)
认识分数复习课教学设计及反思[精选文档]

2021-2022学年部编版四年级上册期末考试语文试卷【含答案】
2023年江苏省泰州市海陵区城北物流园区社区工作人员考试模拟题及答案
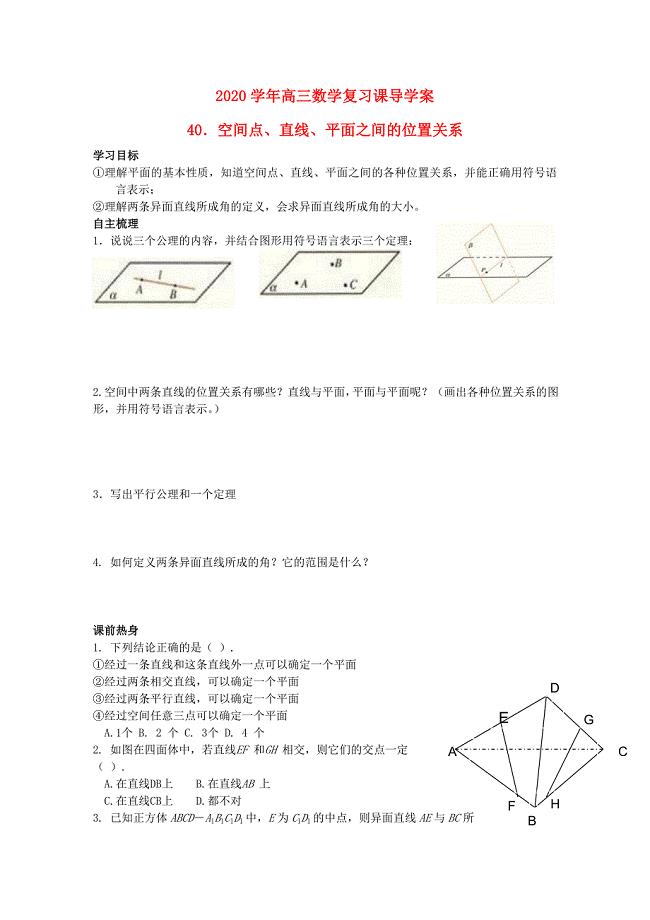
河北省广平县第一中学高三数学复习40空间点直线平面之间的位置关系学案
外协加工合同合集6篇
关于医院工作述职报告三篇
散货及快件运输协议标准范文(4篇)
![[新版]基于单片机一氧化碳报警器设计](https://union.152files.goldhoe.com/2023-5/22/0347757a-b5cf-4815-8071-5af09f6a5e2a/pic1.jpg)
[新版]基于单片机一氧化碳报警器设计
建筑装饰装修工程质量验收规范GB优秀
预算员考试专业管理实务模拟考试(全考点覆盖)名师点睛卷含答案15
2022年高三政治上学期月考一(B卷)(含解析)
机械专业毕业生简历
 开题报告-简易管子除锈机设计
开题报告-简易管子除锈机设计
2023-04-11 6页
《机械设计基础》答案
2022-09-03 44页
万科企业战略环境分析及战略选择
2023-11-07 9页
国际贸易理论练习题
2023-12-10 8页
矿用综合保护器测试系统故障诊断技术研究毕业设计说明书
2023-12-31 44页
机械毕业设计(论文)-齿轮螺栓垫片冲压复合模设计(全套图纸)
2023-10-07 28页
浅谈江苏省农垦农业发展股份有限公司中财务风险的分析与防范
2022-08-24 19页
论文研究思路和研究方法
2022-12-04 4页
机械毕业设计(论文)-锥齿轮加工工艺及钻Φ34孔夹具设计【全套图纸】
2023-10-18 36页
国际商法实训手册汇总
2023-12-23 18页