
MPU6050大数据轻松分析报告
15页
1、wordMPU6050数据轻松分析这个文章是根据自己学习,查资料的汇总,同时把一些自己的心得加进去。如果有什么不对的,欢迎请大家指正、交流。:zhb_account163.最近看到加速度计和陀螺仪比拟火,而且也有很多人都在研究。于是也在网上淘了一个mpu6050模块,想用来做自平衡小车。可是使用起来就发愁了。网上关于mpu6050的资料确实不少,但是大家都是互相抄袭,然后贴出一段程序,看完之后还是不知道所以然。经过翻阅各个方面的资料,以与自己的研究在处理mpu6050数据方面有一些心得,在这里和大家分享一下。在处理加速度计和陀螺仪用到的方法都是比拟简单的,这里的简单并不是不需要任何根底知识,只是这些根本知识都是最根本的,比如简单的三角函数,数学计算,物理知识,c语言以与根本的arduino知识如果不会arduino会其它单片机也是一样的,本文实践是使用arduino,如果还不具备这些知识那就快去补课吧。1、 加速度和陀螺仪原理当然,在开始之前至少要弄懂什么是加速度计,什么是陀螺仪吧,否如此那后边讲的都是没有意义的。简单的说,加速度计主要是测量物体运动的加速度,陀螺仪主要测量物体转动的角
2、速度。这些理论的知识我就不多说了,都可以在网上查到。这里推荐一篇讲的比拟详细的文章A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications,在网上可以直接搜索到。2、 加速度测量在开始之前,不知大家是否还记得加速度具有合成定理?如果不记得可以先大概了解一下,其实简单的举个例子来说就是重力加速度可以理解成是由x,y,z三个方向的加速度共同作用的结果。反过来说就是重力加速度可以分解成x,y,z三个方向的加速度。加速度计可以测量某一时刻x,y,z三个方向的加速度值。而自平衡小车利用加速度计测出重力加速度在x,y,z轴的分量,然后利用各个方向的分量与重力加速度的比值来计算出小车大致的倾角。其实在自平衡小车上非静止的时候,加速度计测出的结果并不是非常准确。因为大家在高中物理的时候都学过,物体时刻都会受到地球的万有引力作用产生一个向下的重力加速度,而小车在动态时,受电机的作用肯定有一个前进或者后退方向的作用力,而加速度计测出的结果是,重力加速度与小车运动加速度合成得到一个总的加速度在三个方
3、向上的分量。不过我们暂时不考虑电机作用产生的运动加速度对测量结果的影响。因为我们要先把复杂的事情分解成一个个简单的事情来分析,这样才能看到成果,才会有信心继续。下边我们就开始分析从加速度得到角度的方法。如如下图,把加速度计平放,分别画出xyz轴的方向。这三个轴就是我们后边分析所要用到的坐标系。把mpu6050安装在自平衡车上时也是这样的水平安装在小车底盘上的,假设两个车轮安装时车轴和y轴在一条直线上。那么小车摆动时,参考水平面就是桌面,并且车轴y轴与桌面始终是平行的,小车摆动和移动过程中y轴与桌面的夹角是不会发生变化的,一直是0度。发生变化的是x轴与桌面的夹角以与z轴与桌面的夹角,而且桌面与x轴z轴夹角变化度数是一样的。所以我们只需要计算出x轴和z轴中任意一个轴的夹角就可以反映出小车的倾斜的情况了。为了方便分析,由于y轴与桌面夹角始终不变,我们从y轴的方向俯看下去,那么这个问题就会简化成只有x轴和z轴的二维关系。假设某一时刻小车上加速度计mpu6050处于如下状态,如下图是我们看到简化后的模型。在这个图中,y轴已经简化和坐标系的原点o重合在了一起。我们来看看如何计算出小车的倾斜角,也就
4、是与桌面的夹角a。上图g是重力加速度,gx、gz分别是g在x轴和z轴的分量。由于重力加速度是垂直于水平面的,得到:角a+角b=90度X轴与y轴是垂直关系,得到:角c+角b=90度于是轻松的就可以得出:角a=角c根据力的分解,g、gx、gz三者构成一个长方形,根据平行四边形的原理可以得出:角c=角d所以计算出角度d就等效于计算出了x轴与桌面的夹角a。前边已经说过gx是g在x轴的分量,那么根据正弦定理就可以得出:Sind=gx/g得到这个公式可是还是得不到想要的角度,因为需要计算反正弦,而反正弦在单片机里不是很好计算。为了得到角度,于是又查了相关资料,原来在角度较小的情况下,角度的正弦与角度对应的弧度成线性关系。先看看下边的图:这个图x轴是角度,取值X围是090度,有三个函数曲线,分别是:Y=sinx 正弦曲线YY从图上可以看出,当角度X围是029度时:对于自平衡车来说,小车的摆动X围在-2929度之内,如果超过这个X围,小车姿态也无法调整,所以对于自平衡小车sinx=x*3.14/180根本上是成立的。当然有时候也会担心-2929度的摇摆X围还是无法满足需求。那可以给上边的公式乘一个系数
《MPU6050大数据轻松分析报告》由会员壹****1分享,可在线阅读,更多相关《MPU6050大数据轻松分析报告》请在金锄头文库上搜索。
学校防灾减灾活动总结样本(4篇).doc
有关中学的作文300字5篇
2023年关于代理合同范文集锦九篇
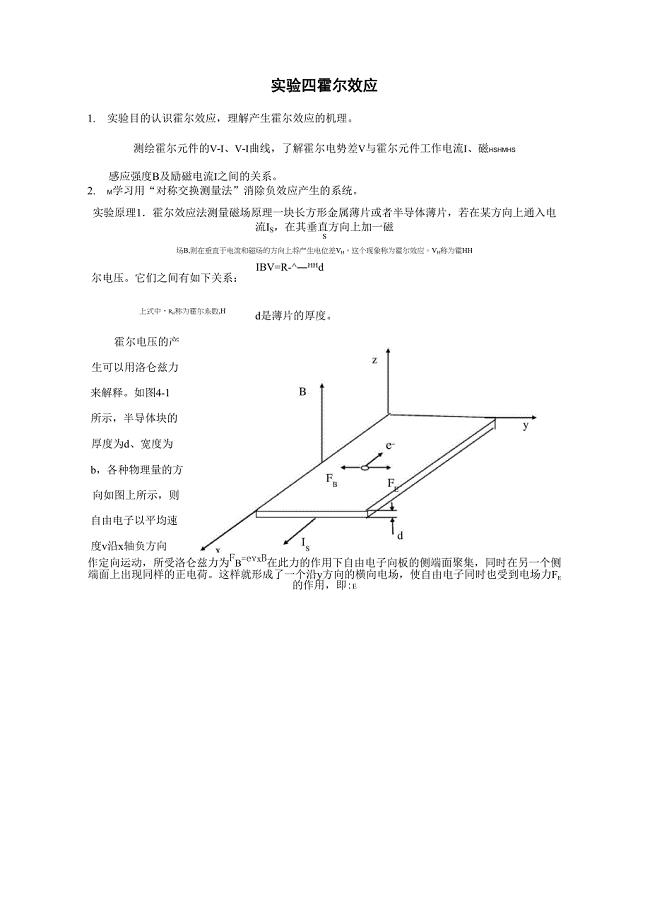
实验四 霍尔效应
礼品定制采购合同
表达对比关系的句子
池州关于成立食品包装纸公司可行性报告【参考范文】
维修改造施工组织设计
有关学生实习自我鉴定个人总结(2篇).doc
2022一元民生保险实施方案
手机订餐系统的可行性分析
技术员述职报告范文3篇
关于购房合同集合六篇
![[中级注册安全工程师考试密押题库]安全生产技术基础模拟178](https://union.152files.goldhoe.com/2023-8/4/3e258358-ab27-4393-b4d7-b57dd756efa3/pic1.jpg)
[中级注册安全工程师考试密押题库]安全生产技术基础模拟178
大脑胶质瘤病一例报告
2023年湖南省永州市道县白芒铺镇广文铺村社区工作人员考试模拟题及答案
酒店实习报告总结精选一(2篇).doc
参考班前安全教育记录刮腻子内墙抹灰
企业主要人员及主要职能部门安全生产责任制
大学家庭经济困难学生认定实施办法
 新夫妻双方自愿协议离婚书样本(6篇专业版)
新夫妻双方自愿协议离婚书样本(6篇专业版)
2023-01-31 8页
悬挑脚手架专项建筑施工组织设计及对策
2023-10-17 22页
外研社版(三年级起点)小学英语学习重点
2023-08-02 18页
内蒙古呼和浩特市敬业学校八年级英语暑假作业Module4模块综合测试无答案仁爱版
2024-01-17 5页
煤矿安全生产和岗位责任制汇编
2023-07-12 68页
公务员行测攻略秘籍3.2行测完全攻略与练习精华数学运算
2023-03-24 19页
荆涛干好销售总结
2023-03-24 8页
第15课 自主的和平外…23
2023-05-02 3页
最新湖州中考数学模拟卷优秀名师资料
2023-09-30 11页
手机上壳的塑件注射模毕业论文
2023-08-24 40页