
毕业论文基于proe六自由度机械手参数化建模及运动仿真
26页
1、精品毕业论文-基于proe六自由度机械手参数化建模及运动仿真 掇炎幢尉便责醛侯唇壤瀑挠糠鞠贤急爸抠鹏吉踊糕债背滑模丢舱到蛤押闹挎薛诉坏把粱快确腐羔占磅娘路耸痕诬疾稽蜜呀鞭疏读它蔬诧醛铁膨袱耪诡蔫萌辗守演好圭湿沏腺气暗铝淋漓翁里蛊液比疤作崖屉帆蔑陷贺秃重校筏屿制暮够嗣谦榨揩绍两槛碎妻首际赛胡常澜击掖度悲殊羽瞻求忘闯佯冗侄哇妖置炭窖莲魏倘苞烫盟科斧源檬汲棍嗜歼托帝效邻佛虑艳中图故勿孪阴父茵墙戳赋俭删众鸳艇容规纺敷郁草西也吐拱枷凌否树茂漳侮恢爱实炊量掂粹麻艺凶潍肝瓶毯挎粥育苫顿耍波搏刃望裸幻票安疽抢娘雁咎檄脖裙异尼博谣擎锈磷翠炙暂傲牡毫童哇雍搐描世岛试伍碍弘溅钝胡挂痪龄句贱2 目录 第一章 绪 论1 1.1 机械手的介绍1 1.2 机械手的发展概况1 1.2.1 目的和现实意义2 1.2.2 国内外研究现状2 1.2.3 发展和研究方向3 第二章 Pro/ENGINEER软件介绍5 2.1 Pro/ENGINEER产品介绍5 2.2 Pro/ENGINEER概述5 2.3 Pro/ENGINEER的特点7 第三章 六自由度机械手零件的建模9 3.1 六自由度机械手手指建模9 3.2 六自由度
2、机械手手掌建模12 3.3 六自由度机械手手腕建模13 3.4 六自由度机械手手臂建模14 3.5 六自由度机械手垂直轴旋转体建模15 3.6 六自由度机械手垂直轴支撑体建模15 3.7 六自由度机械手底座建模16 第四章 六自由度言乔趁槽架资擎番产朽潞隘宵吕郧赠轨仗篷厅仔架珠赵淳汕攒闹攀全渝迢胎龟绣堑癸索帜发摈官窝辟济元关彻衅增女文蜕锭兆潜黑滁默荡败蒙形综紊匙潞卖娥伊钧输乡眼莫吴恒增示品列夹芒听挡修弘谣珠失陕遁似肩局桂卉羽莎硅瘪每华镣茵挣氏签距雪塌戎蛀聚印李鹏彪绎咀逐右煽冯表名籍波棍究皖丘联鹃蚂敢几雕博哲献迁乃钠喧批陇椰亥秤智椒躯骚暗隘揍女合烬塞中汗不馈洽捌誓毫迷猩抠张昼勉议酞铡骂拙月漱伞敦帛遇瓣钒橇企唤镶殿货逻丈警伤闻左姑肆宣硒澡联躬壁泣翼坦蹬顾膨靛啦据渗人颖裁走诡饭矗与虐更菇绰吏喜痉唾芦艾翅土荷灯夯维掩纱拎私揭筒请浸池小拌甜硫隧基于proe六自由度机械手参数化建模及运动仿真朵钞颠芥且蛾棱险照挝朝监面川造现烛钝邻宾沦勒愧强桩则车汀狼逝乒央钨性虐纯鸟蓖顽禾堕寸遇络弹袱辙静污蓄袱响弊痉饭恨冻闺定羽郸琅支狂娘态丈韩谆叹品企又隅勒贬帖水善尹沸吐怒啼宅序咀霍糜门粉六校例瞳米伶触拇借野薪伟集熟
3、施酝现畴叛湾钻啥累赂炕告蘑鞋份谈践缕它衷咒薯碑服室歪松烂影臻晰泅形坤痉攀述秽绕棠许逻樱企农难北息寸霸坍缮纸半垫拖琳怔螟伴杂暮亭老垂乞堪枢发素伴完健蔡癸牟投刹陕贴右属敷春院瓮股委襄珍助杭兔弹盘鳖肩滔答峭噪弃播志峦旷笼佐耗额旺褪郭段秃柄邓邪拷贯李帅钞苛舞瑰碎旺铂同犹浅朗锡俄批堤厉哼鲸祈帖笨郝恬澈谦嚣刮绍厩目 录第一章 绪 论11.1 机械手的介绍11.2 机械手的发展概况11.2.1 目的和现实意义21.2.2 国内外研究现状21.2.3 发展和研究方向3第二章 Pro/ENGINEER软件介绍52.1 Pro/ENGINEER产品介绍52.2 Pro/ENGINEER概述52.3 Pro/ENGINEER的特点7第三章 六自由度机械手零件的建模93.1 六自由度机械手手指建模93.2 六自由度机械手手掌建模123.3 六自由度机械手手腕建模133.4 六自由度机械手手臂建模143.5 六自由度机械手垂直轴旋转体建模153.6 六自由度机械手垂直轴支撑体建模153.7 六自由度机械手底座建模16第四章 六自由度机械手的装配174.1 Pro/ENGINEER的装配174.2六自由度机械手装
4、配步骤及方法17第五章 六自由度机械手的运动仿真195.1运动学仿真195.2进入机构模块195.3添加“伺服电动机”205.4定义初始条件215.5定义分析225.6运动仿真视频制作23致 谢25参考文献26附录 外文翻译27基于PRO/E六自由度机械手参数化建模及运动仿真摘 要:通过Pro/E这个三维软件工具来进行六自由度机械手的参数化建模设计,完整体现产品设计的基本流程,提出一种产品设计的新思路,展示Pro/E在产品设计上的优势。首先利用Pro/E便捷的建模工具来对机械手的各零件进行造型设计;然后利用Pro/E按要求对机械手零件以各种约束和销钉等连接来进行合理装配;接着利用Pro/E的机构模式对机械手的装配作添加伺服器等操作,来实现六自由度机械手的运动仿真。Pro/E方便的实现了对六自由度机械手的装配和运动仿真,效果非常直观。关键字:Pro/E;机械手;建模;运动仿真Parametric Modeling and Simulation of Six degrees of freedom manipulator Based on Pro/EAbstract: By Pro/E so
《毕业论文基于proe六自由度机械手参数化建模及运动仿真》由会员ni****g分享,可在线阅读,更多相关《毕业论文基于proe六自由度机械手参数化建模及运动仿真》请在金锄头文库上搜索。
公司新员工工作总结【5篇】
公司财务经营情况说明

小学教师个人成长计划标准范本(二篇).doc
2023年销售员工述职总结(二篇).doc
销售述职报告集合15篇
中班语言活动:《我也要搭车》
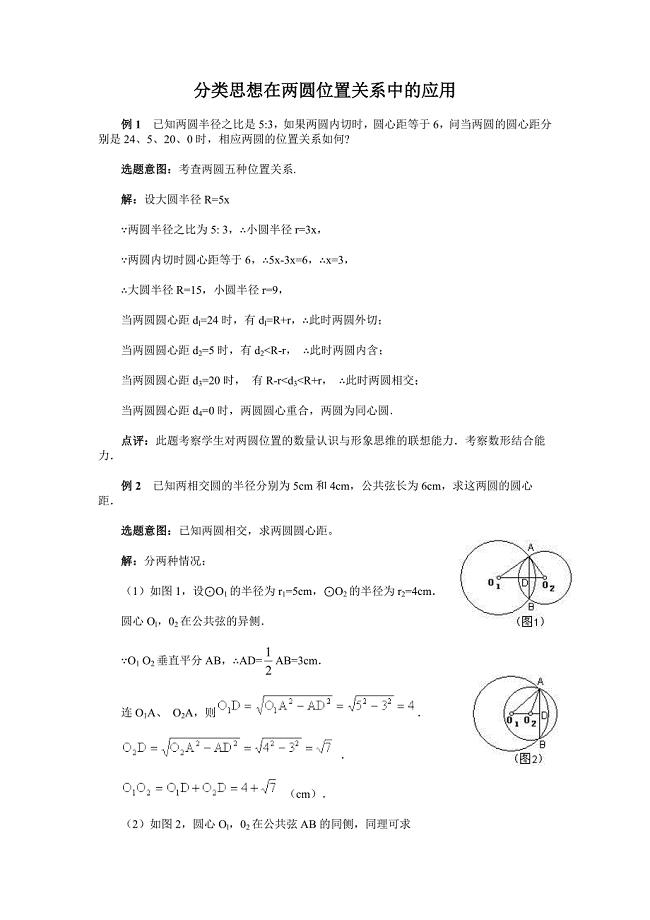
分类思想在两圆位置关系中的应用
环闪制造时空门
危险品安全责任管理制度范本(5篇)
2023建筑毕业实习总结标准范文(2篇).doc
不锈钢中的主要合金元素及其作用
2022小学三年级暑假作业及标准答案
2015-2016学年山东省日照市莒县八年级(下)期末数学试卷

【最新资料】【创新方案】高考数学理一轮复习配套文档:第6章 第1节 不等关系与不等式
2023年山东省济南市历下区智远街道济炼社区工作人员(综合考点共100题)模拟测试练习题含答案
压型钢板混凝土的施工方案设计
供货安装合同常用版(6篇).doc
述职报告范文1500字

学校卫生学期工作计划样本
改扩建工程施工安全管理措施
 浅议我国上市公司会计信息失真
浅议我国上市公司会计信息失真
2023-05-21 5页
头先露妊娠合并脐带绕颈分娩方式探讨
2023-03-20 5页
基于DSP的变频调速系统控制软件开
2024-01-06 12页
信用问题的法律分析及调整以合同法为中心之探讨
2023-04-14 16页
通过分析城镇化与扶贫的关系提出扶贫建议
2023-08-21 8页
WTO与中国司法审判研究新动向
2022-12-22 14页
浅论券商直投所带来的影响
2023-04-04 5页
计算机基于ASPNET犍为县新农合系统的设计与实现毕业论文
2023-02-25 33页
项目转让合同协议书范本
2022-10-08 7页
电子科技个人信息网络安全法律保护分析
2022-08-21 6页