
机械手控制毕业论文
11页
1、毕业论文题目名称:机械手控制系部名称:机电工程系班 级:机电一体化二班学 号:0000学生姓名:XX指导教师:XX2011年 11月 机械手控制摘 要 生产技术和生产力的高速发展,要求现代化企业必须有更高的生产效率,更高的自动化程度及其安全可靠性。机械手可以实现多工步的自动换装,使用可靠安全,通过程序更换就可以实现功能升级。机械手在扩大生产范围,缩短新产品的试制周期,加速产品的更新换代,降低成本和减轻工人劳动强度起到重要作用。 由于工业自动化的全面发展和科学技术的不断提高,对工作效率的提高迫在眉睫。单纯的手工劳作以满足不了工业自动化的要求,因此,必须利用先进设备生产自动化机械以取代人的劳动,满足工业自动化的需求。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械
2、手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。关键词: 工业自动化; 机械化; FMS; FMC; 机械手研究开发目 录摘 要I一、 机械手发展经历及主要构成1(一)发展历史1(二)构成部分1(三)机械手分类1(四)多关节机械手的优势2(五)机械手发展大事记2二、西门子公司及S7-200主要参数功能介绍2(一)适用范围2(二)模拟电位器3(三)脉冲输出3(四)电池模块3(五)各型号的优点3三、机械手设计要求及功能4(一) 控制要求4(二) 机械手运行方式41. 调整工作方式42. 连续工作方式43. 单周工作方式44. 步进工作方式5(三)程序设计要点5(四)程序结构框图5四、基于S7-200的机械手PLC控制程序6五、分析该设计优缺点6致谢7参考资料8 8 郑州经贸职业学院机电系毕业论文机械手控制 一、 机械
3、手发展经历及主要构成 机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人。(一)发展历史机械手首先是从美国开始研制的。1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人。现有的机器人差不多都采用这种控制方式。1958年美国联合控制公司研制出第一台机械手铆接机器人。作为机器人产品最早的实用机型(示教再现)是1962年美国AMF公司推出的“VERSTRAN”和UNIMATION公司推出的“UNIMATE”。这些工业机器人主要由类似人的手和臂组成它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 (二)构成部分 机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、
4、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机 械手设计的关 键参数。自由 度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有23个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。(三)机械手分类机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。(四) 多关节机械手的优势多关节机械手的优点是:动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件,并能绕过机体和工作机械之间的障碍物进行工作.随着生产的需要,对多关节手臂的灵活性,定位精度及作业空间等提出越来越高的要求。多关节手臂也突破了传统的概念,其关节数量可以从
《机械手控制毕业论文》由会员工****分享,可在线阅读,更多相关《机械手控制毕业论文》请在金锄头文库上搜索。
教师学习心得体会模板6篇
山西省劳动协议模板(二篇).doc
2022年高级维修电工(三级)理论考试题库(附答案)
生产车间管理制度
会计职责要求与范本(2篇)
拓展训练心得

人教版六年级英语Unit6_Story_time说课稿
关于财务的个人述职报告集锦5篇
乌鲁木齐关于成立精细化学品公司可行性报告
火力发电厂锅炉炉膛安全监控系统设计技术规定
精选2023年学校会计工作计划样本(八篇).doc
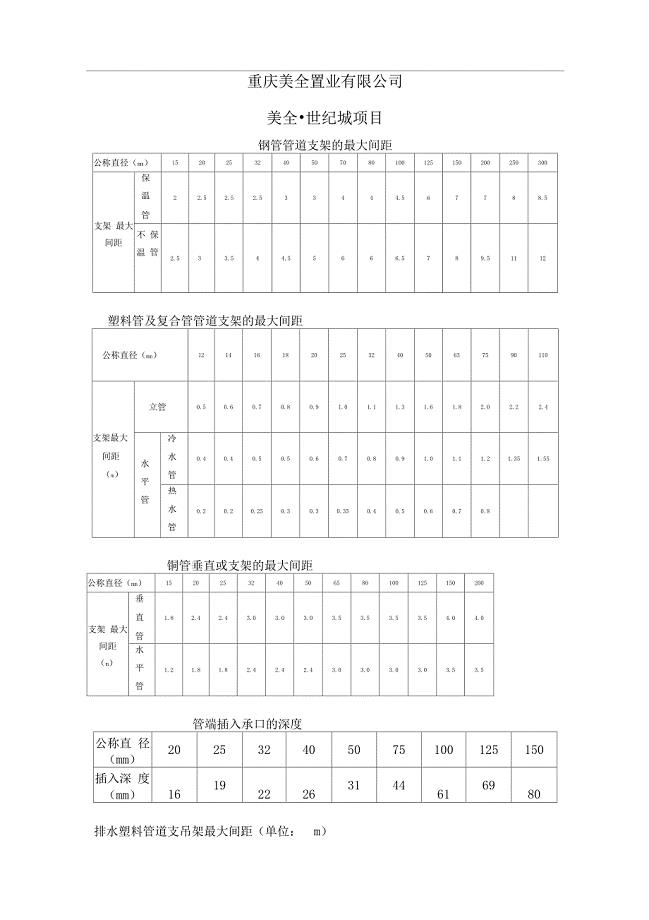
管道支架的最大间距
广告专业实习自我鉴定范文
初中军训心得体会怎么写初中军训心得体会
大学生寒假社会实践活动总结
安全生产月总结范文大全2023实(2篇).doc

电力设计成品质量评定办法
贵州省黔东南州2011年中考英语真题试题(无答案)
新概念英语青少版1B词汇语法知识要点

浙江台州海关综合技术服务中心招考聘用合同制人员历年高频考点试题库答案详解
 办公自动化系统项目计划
办公自动化系统项目计划
2023-04-16 22页
质量保证体系和控制措施
2023-03-27 29页
伤寒与副伤寒
2022-08-27 7页
E算量软件解决问题集
2023-05-13 15页
黄牛买卖合同样本
2023-02-26 5页
留守儿童帮扶计划书
2022-11-24 18页
税收会计存在不足
2022-09-23 2页
拓扑建立于配置wireshark使用及终端注册
2023-04-27 4页
横向科研项目业务费报销办法
2023-07-07 2页
护士面试技巧
2023-04-05 6页