
毕业设计(论文)-有轨装车机机行走机构设计分析(全套图纸三维)
30页
1、分 类 号 密 级 宁毕业设计(论文)有轨装车机机有轨行走机构设计分析所在学院机械与电气工程学院专 业机械设计制造及其自动化班 级11机自x班姓 名学 号指导老师 2015 年 3 月 31 日摘 要有轨装车机机有轨行走机构具有良好的运动性能,在室内环境中可以上下楼梯,跨越台阶,在室外非结构地形中可以、跨越壕沟、自适应路面。通过加载不同的设备和仪器,机器人可广泛用于救援、抢险、防爆、科考、军事等领域,其应用价值十分巨大本文提出了一种3自由度便携式机器人设计方案。机器人整体结构分三段,采用模块化设计,具有可拆装、维修方便等特点,设计完成的机器人与同类机器人相比较,从机械结构上保证了在有轨行走性能、跨沟性能、路面自适应性能等方面更加具有优势。小型地面移动机器人具有体积小巧、机动性高、环境适应能力强、承载能力突出等优点,而机器人的小型化和有轨行走能力的矛盾一直成为其实用化的制约条件,如何提高机器人的有轨行走性能成为近年来移动机器人基础研究的热点问题。本文以基于行星轮链接式车体结构的新型有轨行走机器人为研究对象,围绕机器人的结构设计的优化、有轨行走性能的分析及其机电系统的设计展开了研究,具体研
2、究工作如下: 分析了国内外小型移动机器人的研究设计及其实用化程度的现状,针对基于行星轮系结构和链接式结构的运载平台分别进行了深入的比较和讨论。针对现有传统轮式、腿式和履带式运动底盘的优缺点进行了分析,概况了小型移动机器人未来发展趋势,确定了本文中新型有轨行走机器人的研究背景和设计目标。 分析机器人驱动模块的设计方案,详细推导了其结构相关参数的优化过程。综合现有运载底盘的性能特点,提出了多种车体框架结构方案,并进行了比较、筛选和综合。最终确定了以行星轮驱动模块为有轨行走机构,以链接式结构为车体框架的机器人机构总体方案。 推导行星轮链接式底盘在通过各种时受力情况。对有轨行走分析过程中机器人的相关参数进行了详细的定义与说明,对分析的环境进行了合理、有效的假设以简化计算过程。分析了机器人的轮触地条件、斜坡行驶和攀越台阶等的约束条件。根据其动力和阻力的相互制约情况,将单级台阶的有轨行走过程细化为多个阶段进行详细的受力分析,确定有轨行走高度和多个车体结构参数之间的关系。分析了有轨行走过程中各种参数的耦合和矛盾,指出分析过程中遇到的问题及其研究方向。 结合在ADAMS中虚拟模型的仿真实验结果,优化得
3、到样机的车体结构参数,并设计制作了机器人的机械系统。通过仿真分析初步验证了上述分析理论的正确性。阐述了基于上述有轨行走性能的要求,机器人所需要的控制系统的设计及其具体的实现方案。 设计制作完成的新型有轨行走机器人样机通过了一系列性能试验,得到了样机达到的实际性能指标,并和设计指标进行了比较和分析。试验结果表明新型有轨行走机器人达到了良好的有轨行走性能,行星轮链接式底盘充分地集成了轮式和履带式底盘的优点并成功避开了其各自的缺陷。试验验证了理论分析及仿真的有效性,通过对试验结果进行细致的分析与思考,找出了理论分析与设计过程中需要改进的地方,为下一步工作指明了方向。关键词:有轨行走; 改进设计全套图纸,加15389370625AbstThe portable robot has good performance, can be up and down the stairs, step in the indoor environment, in outdoor unstructured terrain can climb over obstacles, crossing the ditch,
4、adaptive road. By loading different equipment and instruments, the robot can be widely used for rescue, rescue, explosion protection, scientific research, military and other fields, its application value is hugeThis paper presents a 3 DOF portable robot design. The overall structure of the robot is divided into three sections, modular design, has the characteristics of convenient disassembly, repair, and similar robot robot design to complete the comparison, from the mechanical structure to ensu
《毕业设计(论文)-有轨装车机机行走机构设计分析(全套图纸三维)》由会员枫**分享,可在线阅读,更多相关《毕业设计(论文)-有轨装车机机行走机构设计分析(全套图纸三维)》请在金锄头文库上搜索。
福建师范大学21秋《中国现当代散文研究》在线作业一答案参考70
康佳呼叫中心项目实施方案
科研实践的个人总结与评价模板(4篇).doc
防火灾安全教育总结
重点中学七年级(上)期末数学试卷两套合集附答案解析
金融合同证券交易委托代理协议书
生产总监ERP心得体会
精选中学叙事作文集合九篇
let’sspell教案
学校科研年终工作总结模板(4篇).doc
最实用的简单表格简历
2023年个性简短自我介绍范文六篇
六和肉鸡流程
雷坝镇中心小学三年发展规划
录音棚装修方案

房屋建筑工程施工旁站监理管理办法
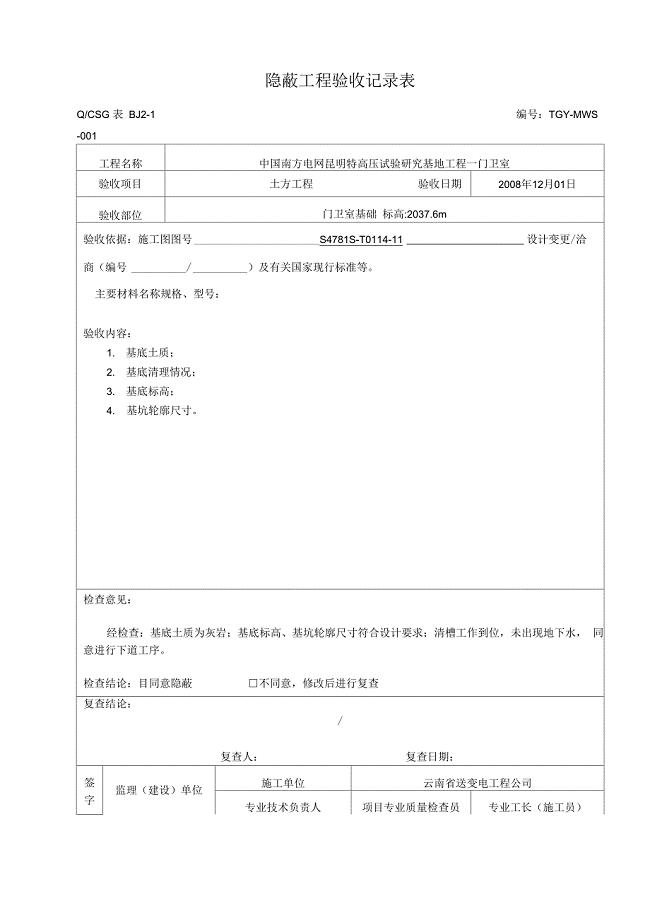
隐蔽工程验收记录表~范本
![[最新]【北师大版】四年级上册:第8单元可能性精品教学案含答案](https://union.152files.goldhoe.com/2023-3/11/0eb707de-1e11-4493-8b94-29be26862102/pic1.jpg)
[最新]【北师大版】四年级上册:第8单元可能性精品教学案含答案
新《商业计划-可行性报告》国家示范性高等职业院校建设项目可行性研究报告8
48篇教学案例分析
 浅谈如何评价学生
浅谈如何评价学生
2023-01-23 5页
武汉理工大学自动化暑期课设机器人行走电路设计
2022-10-09 18页
发动机活塞连杆机构设计
2022-10-17 47页
基于新零售网购的优衣库面向终端客户配送-物流体系的优化
2022-08-29 22页
市场营销专业学生创新能力培养的研究与实践精选教育文档
2022-08-04 7页
本科毕业论文-终身体育意识的培养
2023-08-30 9页
《综采工作面设备配套》设计指导书
2024-02-02 42页
浅谈如何提高学生习作水平
2022-08-17 7页
机械制造技术课程设计-轴承座加工工艺及钻2-φ8孔夹具夹具设计
2023-06-04 30页
定积分的求解方法及其应用
2023-08-01 14页