
毕业设计(论文)关节型机械手设计
40页
1、摘 要本文设计的关节型机械手采用圆柱坐标式,能完成上料、翻转等功能。此机械手主要由手爪、手腕、手臂和机身等部分组成,具有手腕回转、手臂伸缩、手臂升降和手臂回转4个自由度,能够满足一般的工业要求。该机械手由电位器定位,实行点位控制,控制系统采用PLC可编程控制,具有良好的通用性和灵活性。该机械手为液压驱动,4个自由度和手爪的夹紧都由液压缸驱动,在油路的布置和规划中结合机械制造的基础,不断使油路符合制造的可行性,而且将油路布置成空间结构,使机械手的结构更加简洁和紧凑。关键字:关节型机械手 圆柱坐标 液压缸 可编程控制全套CAD图纸,加153893706AbstractIn this paper, the design of the joint-type robot using cylindrical coordinates of type, can be completed on the expected, inversion and other functions. Mainly by the manipulator hand, wrist, arm and body parts, et
2、c., with rotating wrists, arms stretching, arm movements and arm rotation four degrees of freedom, able to meet the general requirements of the industry. The manipulator by the potentiometer position, the implementation of the control points, the control system using PLC programmable control, has a good generality and flexibility. The manipulator for the hydraulic-driven, four degrees of freedom and the clamping gripper driven by the hydraulic cylinder in the circuit layout and planning based on
3、 the combination of machinery manufacturing, and continuously so that the feasibility of manufacturing in line with the circuit, but also circuit layout into a spatial structure, so that the structure of manipulator more concise and compact. Keywords: joint-type robot cylindrical coordinates hydraulic cylinders PLC.目 录摘要 iAbstract ii1 绪论 11.1 研究目的及意义 11.2 本课题研究内容 22 机械手的总体设计 32.1 工业机械手的组成 3 执行机构 3 驱动机构 4 控制系统 42.2 关节型机械手的主要技术参数 42.3 圆柱坐标式机械手运动简图53 关节型机械 械系统设计 63.1 手部 6 夹紧力的计算 6 夹紧缸驱动力计算 7 两支点回转型
《毕业设计(论文)关节型机械手设计》由会员博****1分享,可在线阅读,更多相关《毕业设计(论文)关节型机械手设计》请在金锄头文库上搜索。
住房公积金提取单位证明
高级烟叶分级工理论题库
初中语文课学生学习方式转变的调研报告
英语主动表被动用法归纳
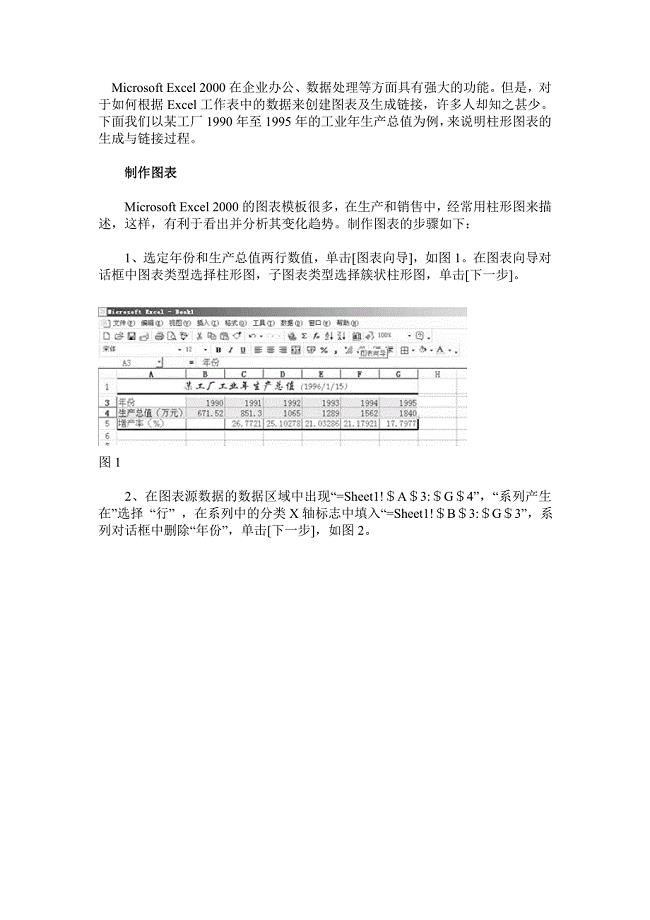
EXCEL如何制作图表图文教程
新年春节联欢晚会主持词开幕词开场白串词台词讲话二与新年给亲人朋友的各种致辞汇编
2023年造价员考试建设工程造价管理基础知识精讲
2022年08月2022重庆石柱县教育事业单位考核招聘“特岗”教师35人网笔试参考题库含答案解析篇
最新整理公路隧道施工技术规范施工支护
人力资源规划的功能
2021年公司工作证明范文
高一第二册的语文作文

2022教师学习心得体会模板汇编七篇
内勤个人年终工作总结范文(2篇).doc
六年级英语上册Unit6Whatdidyoudolastweekend知识清单素材陕旅版三起
氧气瓶和乙炔瓶的安全技术操作规程概要
少先队个人工作总结集合10篇
尾矿库经营部门安全职责
手脚动词人体器官及有关部位名称
2018年宿州市化学实验加试
 海安年产xxx吨UV光固化材料项目可行性研究报告【参考模板】
海安年产xxx吨UV光固化材料项目可行性研究报告【参考模板】
2022-11-12 96页
重庆橡胶管项目运营计划书模板范本
2024-01-07 129页
《中国现当代文学史-上册》复习资料
2023-03-26 6页
2023年在年纪念农垦创建周年座谈会上的讲话范文
2023-09-20 8页
2023年党委书记在年建设“法治企业”工作推进会上的讲话范文
2023-10-18 7页
全县2023年组织工作要点
2022-10-10 5页
2023年年区委书记在全区青年干部座谈会上的发言范文
2023-04-17 9页
《钢铁是怎样炼成的》练习题及答案
2023-03-02 7页
梁平区关于成立环境监测分析仪器公司商业计划书
2023-06-07 106页
小学开学典礼教师代表发言稿
2023-12-09 2页