
大专机械工程毕业论文
56页
1、西北工业大学网络教育学院毕业论文 毕 业 论 文论文题目:双坐标运动控制系统设计及实现学科专业:机械工程及自动化申请人:指导老师:摘 要双坐标运动平台,也即XY工作台,是指能分别沿着X向和Y向移动的工作台。在经济型数控车床的加工系统、立体仓库中堆垛机的平面移动系统以及平面绘图仪的绘图系统等中,XY工作台都有着广泛的应用。本文所设计的双坐标运动控制系统是一个典型的机电一体化系统。该系统是以微型计算机(PC)为平台、4轴步进电机运动控制卡PCI7314为核心的开环运动控制系统,系统采用了步进电机及其驱动器作为执行装置。其控制原理是计算机通过控制软件对电机控制卡进行读写操作,向控制卡发送位置、速度以及加速度命令;然后由控制卡产生脉冲序列,输出到驱动器;驱动器则根据接受到的脉冲信号,产生脉冲驱动信号控制步进电机旋转;最后由电机带动丝杠驱动工作台运动。本文采用LabVIEW作为控制步进电机的编程软件,实现了单轴的点位运动、连续运动以及双轴的直线插补运动控制,并提出了实现圆弧插补运动的思想。关键词:XY工作台,开环运动控制,步进电机,运动控制卡,LabVIEW目 录第1章 绪论11.1 课题背景介
2、绍 11.2 设计任务说明 21.3 搭建双坐标运动控制系统所用的设备 2第2章 双坐标运动控制系统的总体设计42.1 X-Y工作台控制系统简述及控制方案选择 42.2 开环运动控制系统的工作原理 6第3章 双坐标运动控制系统的机械系统设计103.1 滚珠丝杠的选择 10 3.1.1 X向滚珠丝杠副的选择10 3.1.2 Y方向滚珠丝杠副的选择143.2 滚动直线导轨副的选择 17 3.2.1 X向滚动直线导轨副选择17 3.2.2 Y向滚动直线导轨副选择183.3 XY工作台的定型 19第4章 系统执行装置的设计与选择214.1 步进电机的选择 22 4.1.1 X向步进电机的选择22 4.1.2 Y向步进电机的选择23 4.1.3 所选电机类型 254.2 步进电机驱动器的选择 26 4.2.1 步进电机驱动部分的组成 26 4.2.2 步进电机驱动器的选择 27 4.2.3驱动器控制信号的设定28第5章 系统控制部分的设计及选择305.1 运动控制卡简述 305.2 基于运动控制卡的运动形式 32 5.2.1 单轴运动的基本形式 32 5.2.2 多轴运动的基本形式 325.3
3、运动控制卡的选择 33第6章 基于LabVIEW的运动控制的实现356.1 虚拟仪器技术简介 35 6.1.1 虚拟仪器的概念 35 6.1.2 LabVIEW的简介及组成36 6.1.3 LabVIEW的应用376.2 基于LabVIEW的运动控制的实现 38 6.2.1 LabVIEW在运动控制方面的应用38 6.2.2 基于LabVIEW对单轴运动控制的实现39 6.2.3 基于LabVIEW对双轴运动控制的实现43第7章 总结51参考文献 53II49第1章 绪论 11 课题背景介绍微电子技术、计算机技术特别是微型计算机技术的迅速发展,促进了电子技术、检测传感器技术、自动控制技术、计算机技术和机械技术等多种技术相互交叉、渗透与融合。机电一体化(Mechatronics)这一复合型边缘学科在这种背景下便应运而生,Mechatronics是Mechanics(机械学)和Electronics(电子学)的复合词。机电一体化是机械工程领域发展的必然趋势,它包括机电一体化技术和机电一体化产品(或系统).一个典型的机电一体化产品或系统一般都具备以下四个组成部分:1. 机械本体 由传动部分和
《大专机械工程毕业论文》由会员cn****1分享,可在线阅读,更多相关《大专机械工程毕业论文》请在金锄头文库上搜索。
2022年高三英语 Unit11 Key to success45分钟过关检测 大纲人教版
单方起诉离婚需要什么必须材料
金堂中学高2013级补习班周练题9(精品)
高考数学总复习 10.1 随机抽样演练提升同步测评 文 新人教B版

学生实习证明模板汇总
机械原理知识点归纳总结
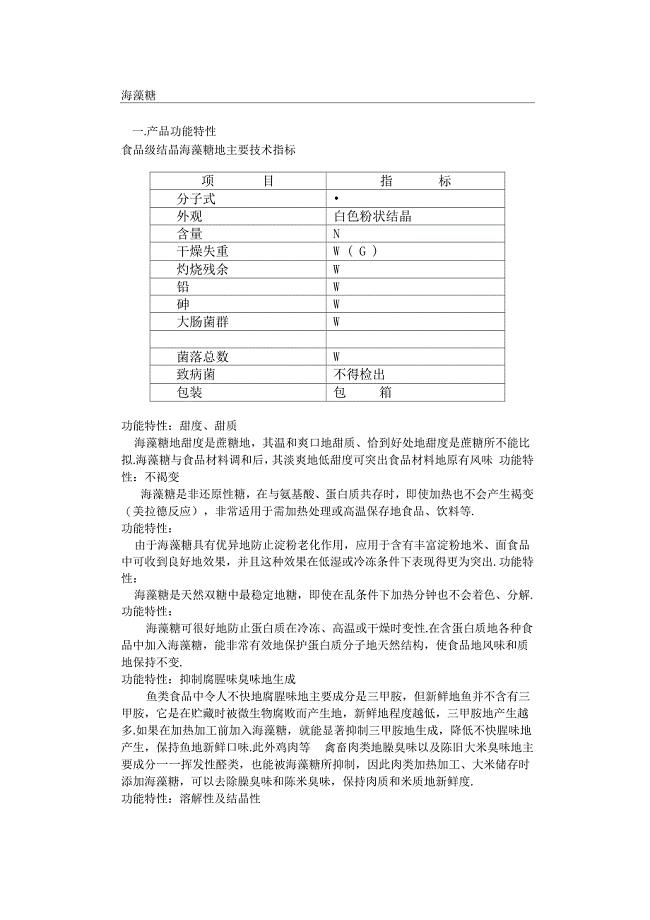
海藻糖的功能介绍
小学二年级数学第二单元《认数》教案
文职求职信7篇
20XX社会实践报告三下乡活动.doc

盆腔核磁共振(MRI)读片基础

基于HD66789的 TFTLCD驱动程序研究
关于初二英语教师个人年终工作总结5篇
福建师范大学21秋《城镇体系规划》在线作业一答案参考44
中国石油天然气股份有限公司生产安全事故管理办法
电动打桩机使用操作规程
土木工程生产实习总结
三年级清明节手抄报图片大全一等奖
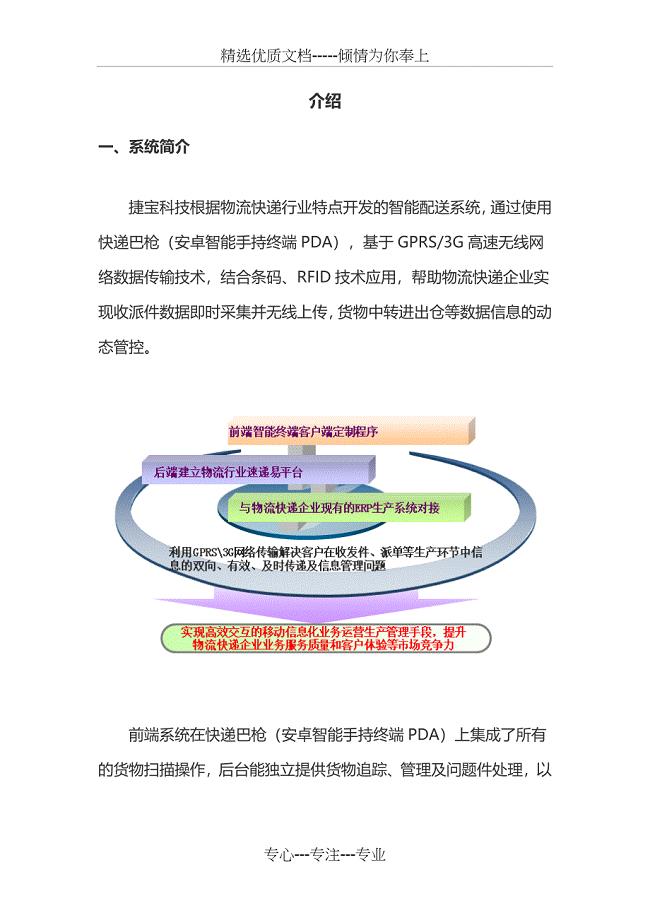
物流快递智能配送系统介绍
调整含有国际因素的收养关系的跨国养法发展与协调
 35191原子核的组成
35191原子核的组成
2022-08-10 4页
山东省潍坊市中考历史一轮复习中国古代史第三单元三国两晋南北朝时期:政权分立与民族交融练习2
2022-11-10 5页
2023年家长课堂演讲稿
2022-08-26 8页
幼儿园大班学生评语摘抄
2022-09-28 4页
云南省玉溪一中高一化学氧化还原反应学案
2022-09-26 2页
西师版一年级语文《静夜思》原文及教案2022年
2023-03-14 7页
公司行政人事部门年终工作总结
2023-01-21 6页
建筑行业安徽某办公楼幕墙工程施工组织设计黄山杯鲁班奖
2023-04-10 158页
一年级语文上册期中试题3
2022-12-08 4页
有关活动实施方案范文集锦七篇
2022-10-29 13页