
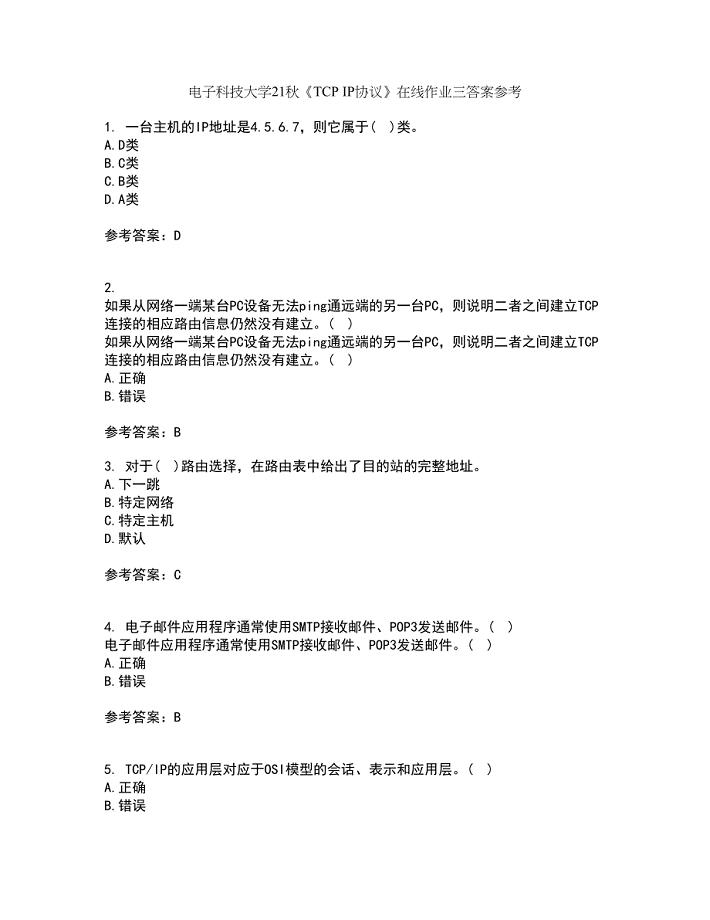
外文翻译--基于Dubins路径的智能车辆路径规划算法研究 英文版
6页
1、1 REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) This paragraph of the first footnote will contain the date on which you submitted your paper for review. It will also contain support information, including sponsor and financial support acknowledgment. For example, “This work was supported in part by the U.S. Department of Commerce under Grant BS123456”. The next few paragraphs should contain the authors current affiliations, including current address and e-ma
2、il. For example, F. A. Author is with the National Institute of Standards and Technology, Boulder, CO 80305 USA (e-mail: author boulder.nist.gov). S. B. Author, Jr., was with Rice University, Houston, TX 77005 USA. He is now with the Department of Physics, Colorado State University, Fort Collins, CO 80523 USA (e-mail: authorlamar.colostate.edu).T. C. Author is with the Electrical Engineering Department, University of Colorado, Boulder, CO 80309 USA, on leave from the National Research Institute
3、for Metals, Tsukuba, Japan (e-mail: authornrim.go.jp).Song Guo-Hao,Huang Jin-Ying,Lan Yan-Ting(School of Mechanical and Power Engineering, North University of China Taiyuan,030051)AbstractThe path planning is one of the core issues of intelligent vehicles. All paths can be decomposed into Dubins path. This paper did sectional research into the intelligent vehicles travel path under the ideaofDubins path and carried out tests on the executionperformance of the algorithm using PID control strategy
4、. Researches showed that this algorithm could calculate the vehicles shortest path, reduced the vehicles path length, shortened the driving time, reduced the computationamount of the control system, improved theenforcementof the vehicleexecution system, reduced the execution error, had a good selectivityof the optimal path.Index TermsIntelligent Vehicles, path planning,Dubins path, the shortest path. I. INTRODUCTIONPATH planning is used in many fields, such as: military unmanned aircraft, space
《外文翻译--基于Dubins路径的智能车辆路径规划算法研究 英文版》由会员re****.1分享,可在线阅读,更多相关《外文翻译--基于Dubins路径的智能车辆路径规划算法研究 英文版》请在金锄头文库上搜索。
![一次函数压轴题[含答案解析]](https://union.152files.goldhoe.com/2023-7/27/fe20a1a2-46e1-425d-b00c-0127b6d1124f/pic1.jpg)
 设计用PLC自动控制多种混合液体任务书
设计用PLC自动控制多种混合液体任务书
2023-09-30 1页
毕业论文(设计)格式和版式基本规范
2023-04-14 10页
空间多孔加工的组合机床主轴箱设计毕业论文+开题报告
2023-05-03 51页
0.8吨扩管机液压系统设计任务书
2023-03-29 1页
120吨舰船水动力测试转台锁紧定位装置液压系统设计任务书
2022-11-30 1页
钢板头矫直机设计任务书
2023-11-11 2页
自动存取自行车库的设计开题报告
2023-11-24 4页
外文翻译--在完成面表面粗糙度模型在MQL和干切削条件下的铣削 中文版
2023-06-02 6页
三坐标测量机测头的误差校准
2023-08-22 5页
ABS手机外壳注塑模毕业设计论文
2023-06-21 39页