
步进电机角度控制
12页
1、步进电机角度控制1. 编程控制步进电机顺时针行走,180度(角度显示在七段LED上),3秒后行走45度(显示角度),3秒后行走90度(显示角度),3秒后行走180度,依次循环。#include #define uchar unsigned char#define uint unsigned int#define PA 0x60#define PB 0x61#define PC 0x62#define CTRL 0x63uchar pai=0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09;uchar teble=0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07, 0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71;uint m=0;uchar a3,a2,a1,a0=0;void delay(uint xms)uint i,j;for(i=xms;i0;i-)for(j=110;j0;j-);void display()outp(PA,teblea0);outp(PB,0x07);delay(10);
2、outp(PA,teblea1);outp(PB,0x0b);delay(10);outp(PA,teblea2);outp(PB,0x0d);delay(10);outp(PA,teblea3);outp(PB,0x0e);delay(10);void zhuan(uint zz)uint temp,i,j;a3=zz/1000a2=(zz%1000)/100;a1=(zz%100)/10;a0=(zz%10);temp=(uint)(zz/15*4);for(i=temp;i0;i-) for(j=3;j0;j-)display();outp(PC,paim);m+;if(m7)m=0;void main()int i;outp(CTRL,0x88);while(1)zhuan(180);for(i=75;i0;i-)display();zhuan(45);for(i=75;i0;i-)display();zhuan(90);for(i=75;i0;i-)display();2. 完成A/D转换实验并把转换结果在七段LED上显示出来。#include #define uchar u
3、nsigned char#define uint unsigned int#define PA 0x60#define PB 0x61#define PC 0x62#define CTRL 0x63#define AD 0x00uchar pai=0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09;uchar teble=0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07, 0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71;uint m=0;uchar a3,a2,a1,a0;void delay(uint xms)uint i,j;for(i=xms;i0;i-)for(j=110;j0;j-);void display()outp(PA,teblea0);outp(PB,0x07);delay(10);outp(PA,teblea1);outp(PB,0x0b);delay(10);outp(PA,teblea2);outp(PB,0x0d);delay(10);outp(PA,teblea3);
《步进电机角度控制》由会员新**分享,可在线阅读,更多相关《步进电机角度控制》请在金锄头文库上搜索。
小学四年级下册家长会班主任发言稿
马铃薯高产栽培技术
2022年城管局环境卫生整治工作汇报农村环境卫生整治汇报材料
幼儿教育心理学试题及答案一
设备主管述职报告范文
河北省某某电力公司档案管理系统
中华人民共和国企业法人登记管理条例
中班教师个人计划(15篇)
宁夏银川一中高三第四次月考题理科综合
移动护理解决方案设计
四年级单位换算(小数)
软件系统需求说明书
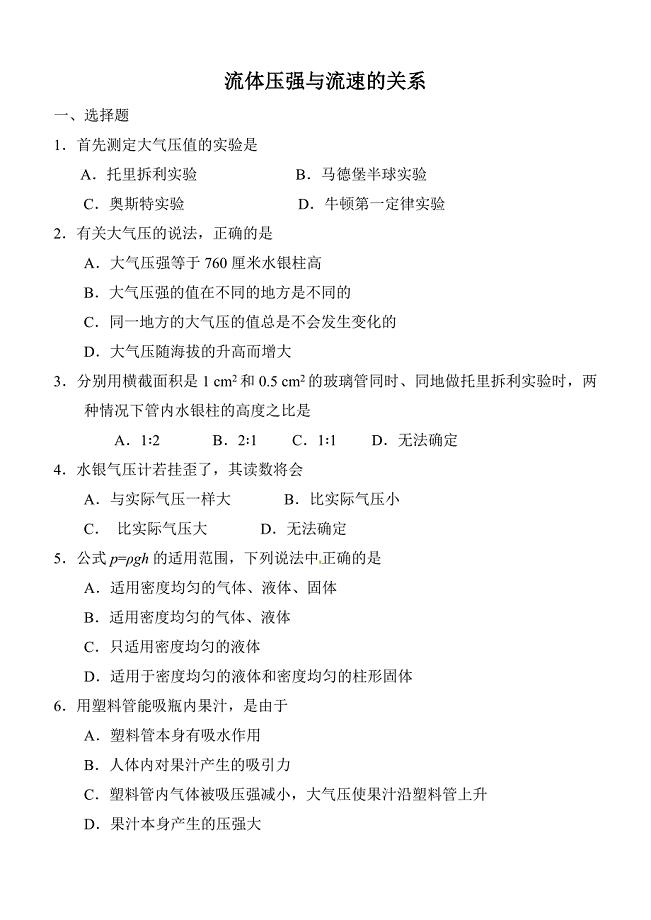
流体压强与流速典型练习题
南开大学21秋《国际经济学》复习考核试题库答案参考套卷60

铁路超限超重货物运输电报管理规定
“幼儿园小二班十月计划”幼儿园工作计划
工程师的工作总结范文4篇
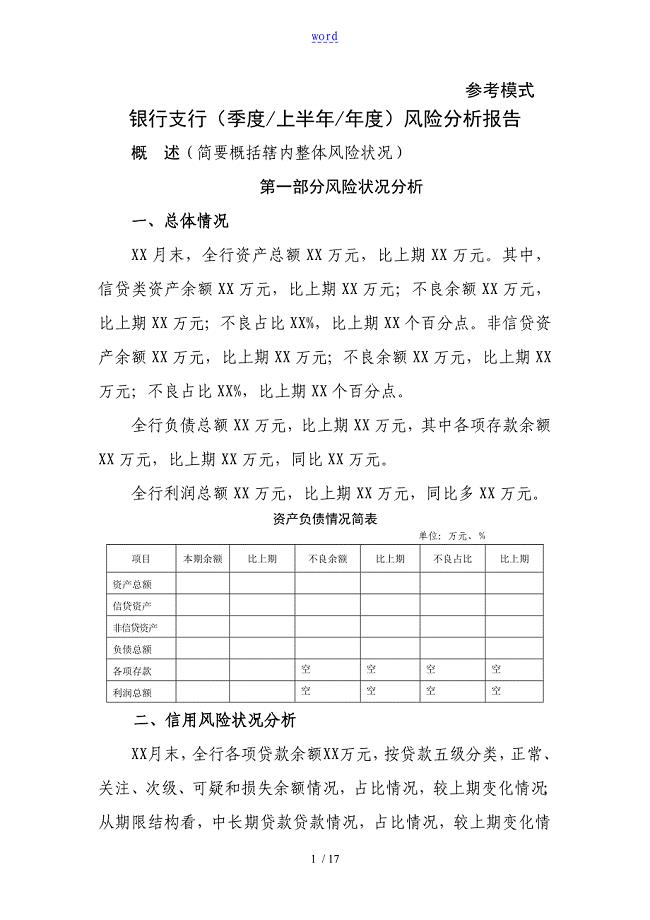
银行季度风险分析报告报告材料实用模板
幼儿园庆祝六一儿童节活动策划方案
小区道路及室外管网工程施工承包合同范本
 输变电工程铁塔组立作业指导书
输变电工程铁塔组立作业指导书
2023-08-05 21页
主要成本构成表
2023-09-05 2页
加doing的动词及短语
2023-04-27 2页
晚会后勤准备流程模板
2023-11-16 1页
链板式输送机的设计计算
2022-10-26 11页
引起靛颏“喘”的寄生虫
2023-02-11 3页
高速公路收费管理系统的设计与实现
2023-04-26 21页
函数奇偶性的六类经典题型
2023-10-13 7页
中医多媒体教学的不足与对策
2023-01-10 6页
劳务管理实名制方案
2023-07-12 11页