
基于模糊Petri网的加工过程智能控制系统
4页
1、2 0 0 6 中国控制与决策学术年会论文集P r o c e e d i n g so f2 0 0 6C h i n e s eC o n t r o la n dD e c i s i o nC o n f e r e n c e4 6 9基于模糊P e t r i 网的加工过程智能控制系统张建军,韩煜,张利( 台肥工业大学机械与汽车工程学院舍肥2 3 0 0 9 9 )摘要:蒋模糊推理规则与P e t r i 罔相结合的模糊P e t r i 罚应用子加工过程的智能监控,并且葶入了分层连阶智能控制的方法,组轵敷谩计中,秉用模橱推理的方法,并用标识模糊P e t r i 罔为其推理过程进行熏横 协调敷设计中,以一台加工中心,一十机械手或一十工业机器、组成曲加工系统为倒,运用攫糨P e t r l 嗣为其协调罂进行了合理规迥关建词;模翔推理f 标识模期P e t r i 罔 递醣智能控制;组轵级 协调投I n t e l l i g e n tC o n t r o lo fM a c h i n i n gP r o c e s sB a s e dO nF u z z yP e
2、 t r i N e tZ H A N GJ i a n 一血n ,M A NY u ,Z H A N G 厶( S c h o o lo fM a c h i n e r ya n dA u t o m o b i l eE n g i n e e r i n g ,H e MU n i v e r s i t yo fT e c h n o l o g y I - l e f e i2 3 0 0 0 9 ,C h i n a C o r r e s p o n d e n t :H A NY u tE - m a i l ;h a n y u i a l a h h f u t e d u o n )A b s t r a c t :F u z z yP e t r in e t ,w h m hi si n t e g r a t i o no fP e t r in e ta n df u z z yr e a s o n i n gi su s e di ni n t e l l i g e n tc o n t r o lo fm a c h i n i n gp r 。
3、c e ,m e a n w h i l e ,h i e r a r c h i c a li n t e l l i g e n tc o n t r o li si n t r o d u c e d F u z z yr e a s o n i n gi sa d o p t e dt od e s i g nt h eo r g a n i z a t i o nl e v e l A n d t h er e a s o n i n gp r o c e s si sd e s c r i b e dh yn m r k e df u z z yP e t r in e t I nt h ed e s i g n “t h ec o o r d i n a t i o nl e v e l ,f u z z yP e t r in e ti su s e dt od e s e r i b e dt h em a c h i n i n gs y s t e mw h i c hi sc o m p o s e do f 0m a c h i n ec e n t e r
4、。am a n i p u l a t o ro rai n d u s t r i a lr o h o t K 吖_ ”d s IF u z z yr e a s o n i n g M a r k e dt u = yP e w in e t IH i e r a r c h i c a li n t e l l i g e n tc o n t r o l ,O r g a n i z a t i o nl e v e l C o o r d i n 8 t i o nl e v e l1g l言随着制造业和信息技术的高速发展,要求控制理论能够处理更加复杂的系统控制问题,从而提供更加有效的控制策略现代加工系统属于典型的离散事件动态系统( D E D S ) ,因而其控制具有高度的复杂性,不仅涉及到加工设备、刀具、工件、工艺规程、物料运输等方面的协调与管理,还要涉及加工作业计划的制定以及实时监控与调度等复杂工作 1 ,显然这是传统的控制理论所难以解决的P e t r i 网作为D E D S 的一种主要建模方法,用简单的图形表示组合模型,能够较好地描述系统的结构,以网图的形式,简
《基于模糊Petri网的加工过程智能控制系统》由会员jiups****uk12分享,可在线阅读,更多相关《基于模糊Petri网的加工过程智能控制系统》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
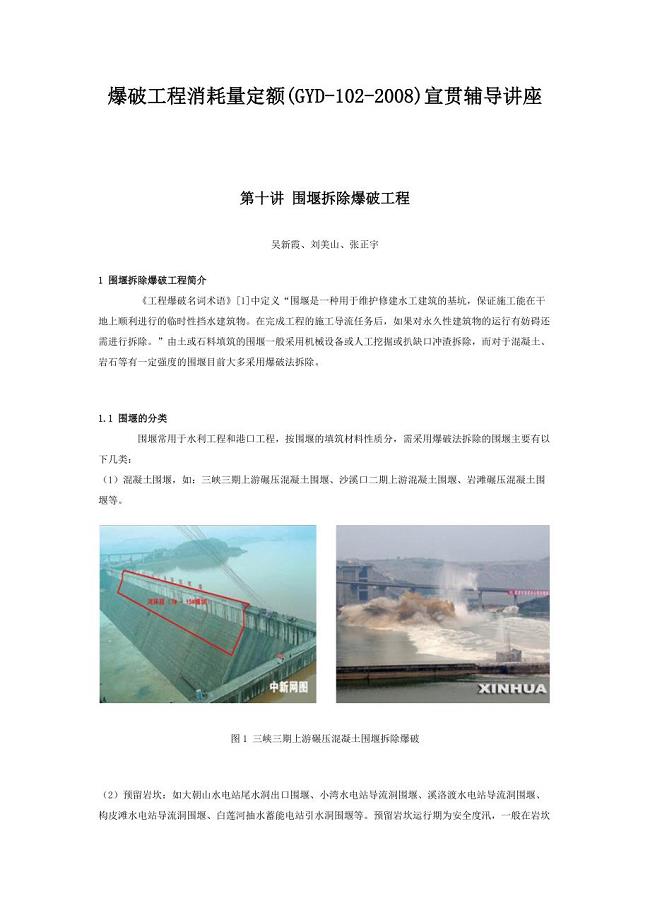
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
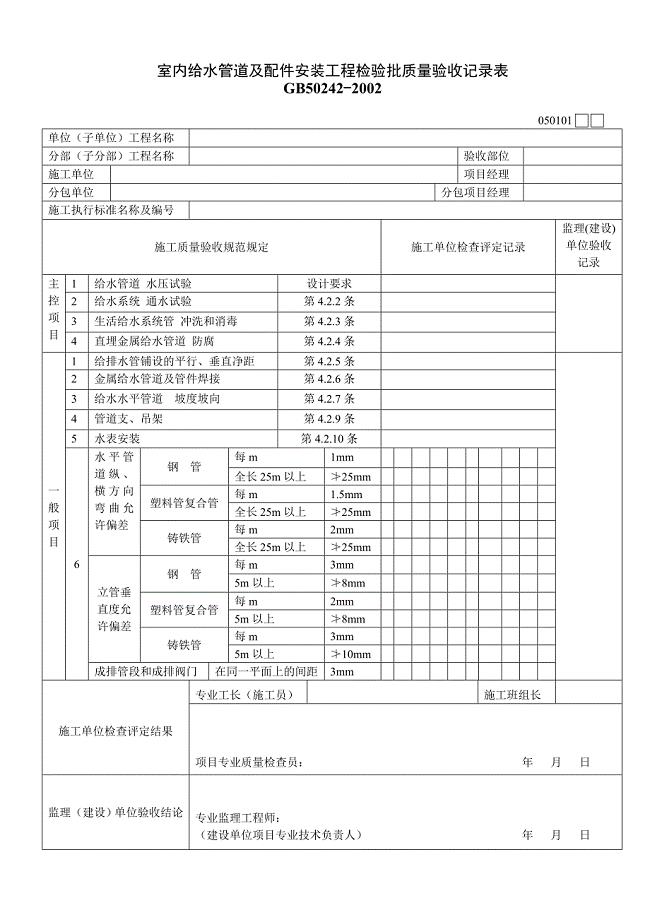
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 埃里克森的人类发展的八个阶段
埃里克森的人类发展的八个阶段
2022-08-31 8页
毕业设计(论文)-基于高职学院学生信息管理系统的设计与应用
2023-09-27 58页
抛物线的常见结论
2023-02-21 8页
大班幼儿语言活动教案
2023-12-09 13页
基于JSP的图书管理系统的设计与实现
2022-12-29 34页
8086交通灯微机课程设计
2022-10-26 24页
移动学习的应用模式论文提纲
2023-09-04 3页
方物Fronware vCenter v2.9.6用户手册
2023-09-20 171页
PSpice仿真教程2--对静态工作点的温度特性分析
2023-04-01 5页
家庭教育对幼儿社会化心理的影响探究
2024-01-28 16页