
基于ADAMS水陆两栖车平顺性分析
35页
1、基于ADAMS的水陆两栖车平顺性分析北京理工大学机械与车辆学院目 录第一章 项目综述1.1项目背景1.2项目研究目的及意义第二章 基于ADAMS的多体动力学仿真方法概述2.1虚拟样机技术及ADAMS模块构成2.2ADAMS理论基础2.3ADAMS/CAR文件体系2.4本章小结第三章 水陆两栖车在ADAMS/CAR环境下的模型搭建3.1悬架系统的模板建模 3.1.1麦弗逊式悬架的模型搭建 3.1.2单纵臂悬架的模型搭建3.2 轮胎系统的模板建模3.3 车身系统的模板建模3.4 转向系统的模板建模3.5 制动系统的模板建模3.6 动力系统的模板建模3.7 本章小结第四章 利用ADAMS进行水陆两栖车整车装配及仿真实验4.1 基于模板建立车辆子系统4.2 水陆两栖车的整车装配4.3随机不平路面下的整车平顺性实验仿真 4.3.1加载实验路面文件 4.3.2加载实验控制文件 4.3.3 进行整车平顺性试验仿真4.4本张小结第五章 水陆两栖车仿真实验后处理及结果分析5.1 利用ADAMS对仿真实验结果进行后处理5.2 基于ADAMS的水陆两栖车平顺性仿真结果分析第六章 项目总结第一章 项目综述1.
2、1 项目背景水陆两栖车,又名水陆两栖船,水陆两用船,水陆两用车,水陆两用艇; 它是结合了车与船的双重性能,既可像汽车一样在陆地上行驶穿梭,又可像船一样在水上泛水浮渡的特种车辆。由于其具备卓越的水陆通行性能,可从行进中渡越江河湖海而不受桥或船的限制,因而在交通运输上,具有其特殊的历史意义。多用于军事,救灾救难,探测等专业领域。水陆两用车的发展可追述上百年的历史,有资料记载上的第一辆水陆两栖车由美国人Oliver Evans于 最早记录水陆两栖车的照片1805年发明.为了能在水中行驶,Oliver Evans在车上装了轴和桨轮,用发动机飞轮轴的皮带和皮带轮来驱动桨轮.当这辆两栖车一到水中,车尾的桨轮开始工作。更准确的描述,Oliver Evans的发明应该称为是“一辆使用蒸汽动力的装有轮子的船”从结构和使用上判断这个发明是一只能在水中行走的车。照片记载的真正意义上水陆两栖车应当是这辆第一次世界大战期间为奥地利军队制造的水陆两栖车,但由于种种原因, 左德军装备82型军车,右166水陆两栖车该车并没有大量生产.二战期间,德军装备的大众166型水陆两用车,陆地行驶最高速度接近90公里/小时,水中
3、速度10公里/小时左右。该车装备部队以后受到德军官兵的广泛欢迎,到1944年末,沃尔夫斯堡工厂和保时捷位于斯图加特的工厂总计生产了14238辆。美军水陆两栖车,被称“大澡盆”第二次世界大战中,除了德军之外,美军也装备了大量的两栖车辆,但美军的水陆吉普设计的并不是很成功,没有得到士兵的广泛 好评,该车在设计之初就存在很多缺点,如车身太重;干舷太低;还有若干技术上的缺陷,在以后的使用中虽然不断改进,仍然不能取得满意的效果, 该车一共生 产了12778辆。汽车平顺性,是指汽车在一般行驶速度范围内行驶时,能保证乘员不会因车身振动而引起不舒服和疲劳的感觉,以及保持所运货物完整无损的性能。由于行驶平顺性主要是根据乘员的舒适程度来评价,又称为乘坐舒适性。研究汽车平顺性的主要目的就是控制汽车振动系统的动态特性,使振动的“输出”在给定工况的“输入”下不超过一定界限,以保持乘员的舒适性。汽车平顺性评价方法:上世纪30年代以来在汽车平顺性评价方法方面进行了许多实验研究工作,但难以得到公认的评价方法和指标。直到1974年,国际标准化组织在综合大量有关人体全身振动的研究成果的基础上,制定了国际标准ISO2631
4、:人体承受全身振动评价指南.新标准规定在评价振动时先计算各自由度上总的加权均方根值,再计算各输入点的振动加速度均方根,然后计算人体承受的总加速度均方根值,最后用总的振动加速度均方根值与人的主观感觉来判断乘员舒适性.新标准基本上克服了原标准的缺点,在试验基础上给出了极为详细的频率加权函数轴加权系数以及明确的舒适性界限,同时还保留了大家熟悉的加速度均方根值作为评价指标,使用起来方便直观,是至今为止最为完善的评价方法.ISO26311:1997(E)标准规定了图1所示人体坐姿受振模型。在进行舒适性评价时,它除了考虑座椅支承面处输入点3个方向的线振动,还考虑该点3个方向的角振动,以及座椅靠背和脚支承面两个输入点各3个方向的线振动,共3个输入点12个轴向的振动。此标准仍认为人体对不同频率振动的敏感程度不同,在图2上给出了各轴向0.5-80Hz的频率加权函数(渐进线),又考虑不同输入点、不同轴向的振动对人体影响的差异,还给出了各轴向振动的轴加权系数k。1.2 项目研究目的及意义本次项目的目的在于,通过在 ADAMS/CAR模块里建立水陆两栖车的模型,利用ADAMS软件对整车模型进行仿真实验,以得到
《基于ADAMS水陆两栖车平顺性分析》由会员ni****g分享,可在线阅读,更多相关《基于ADAMS水陆两栖车平顺性分析》请在金锄头文库上搜索。
2023广告牌制作合同样本(八篇).doc
维修合同集合6篇
东北农业大学21秋《电子商务》在线作业一答案参考76
年终述职大会简报
甲乙双方签订的公路运输合同范本集锦.doc
幼儿教师计划总结(三篇).doc
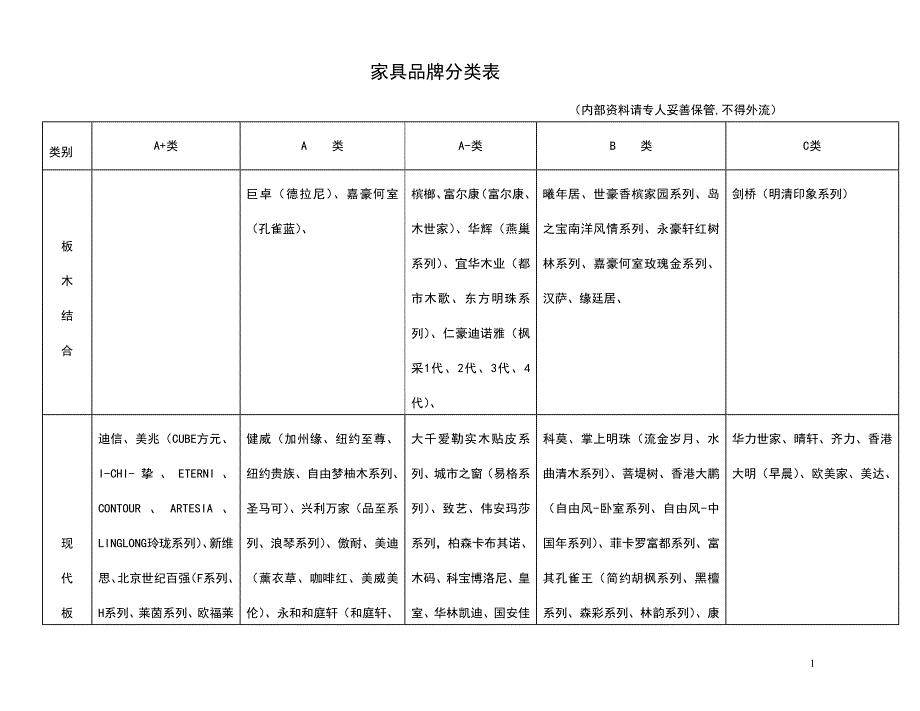
家具品牌ABC分类表
智能刹车系统的未来发展
数学教师年终工作总结标准模板(二篇).doc
2023年度护士个人计划模板(三篇).doc

年产80万个塑料桶项目资金申请报告写作模板定制
【精选】周记高中生寒假4篇
环保主题演讲稿七篇
骨外科护理常规
【最新】四川省三台县九年级期末教学质量检测试题
诵读经典演讲稿精选5篇
普通高中学生自我鉴定范文.doc
优秀护士演讲稿6篇(护士优质护理演讲稿)
网站建设服务合同
中药专业求职信3篇
 C语言编译器设计与实现毕业论文设计
C语言编译器设计与实现毕业论文设计
2022-07-28 51页
专项施工方案(综合布线系统).doc
2023-06-29 13页
教育参考高中数学变式教学应用的分析
2023-03-21 5页
政法农村土地储备分析
2023-01-22 5页
2019秋季四年级语文上册各单元基础知识复习检测
2023-11-01 30页
(完整版)盖梁与墩柱连接方式研究综述
2022-11-18 13页
浅析兴趣对单词记忆的重要性
2023-09-14 4页
论如何把传统元素运用到现代的艺术中景观设计
2022-12-31 4页
高速公路互通式立体交叉设计探讨
2023-09-26 5页
XX集团办公楼设计开题报告
2022-07-25 5页