
PLC在仿生鱼鳍随动系统中的应用
7页
1、专题PLC在仿生鱼鳍随动系统中的应用摘要:减摇鳍是最为行之有效的一种主动式船舶减摇装置,它的减摇效率高,经过多年的发展,已广泛应用于各种船舶中。它的减摇原理是:船舶在水中行驶过程中,当鳍在水中有一个速度和倾斜角的时候,就会产生一个升力,利用此升力产生的力矩来抵抗海浪的干扰力矩,便可达到减小船舶横摇的目的。随着科学技术的发展,减摇鳍系统正在逐步完善,减摇效果也在不断提高。 近年来,在工业生产的自动化控制领域中,正普遍利用一种新型控制设备-可编程控制器()。目前的正在向着精度更高、功能更多、使用更方便的方向发展。从的发展趋势来看,控制技术将成为今后工业自动化的主要手段。将其引入减摇鳍控制系统中,实现数字化控制,将进一步提高控制系统的灵活性和可靠性。 关键词:减摇鳍 模拟量 随动系统 Summary: Reduce to shake fin is most for go of valid of a kind of active type ships reduce to shake device, it reduces to shake an efficiency high, through
2、the development of more than 60 years, already extensively applied in various ships.Its reducing to shake principle BE: The ships drives process in the water in, be the fin has a speed and angle of bank in the water of time, will produce a rise dint, making use of this dint that rises the dint creation to resist the interference dint of the wave, can attain to let up ships then horizontal shake of purpose. Along with science technical development, reduce to shake the fin system just at gradually
3、 perfect, reduce to shake result also Be raising continuously.In recent years, in the automation control realm of the industrial production, just widespread make use of a kind of new control equipments-programmable controller(the ).The current is higher just in the facing accuracy, the function is more, usage more convenient direction development. See from the development trend of the , the control technique will become from now on the main means of the industrial automation. Lead it in to reduc
4、e to shake the fin control system in, carry out numeral to turn a control, will raise the vivid and the credibility of control the system further. Keyword: Reduce to shake fin emulation quantity with move system. 减摇鳍随动系统的构成及工作原理减摇鳍的随动系统连接来自控制系统的控制信号,是转鳍机构的中间转换和功率放大环节。改造前,每个随动系统由稳压电源板、综合放大板、操纵转换板、液压控制系统以用转鳍机构、反馈、限位元件等组成。随动系统应尽可能快速、准确、稳定地工作。目前,大多数减摇鳍的随动系统都是电液随动系统。本系统以型减摇鳍的阀控式电液随动系统为原型,对其做了适当的改进,下面进行详细介绍。 原有随动系统的工作原理图如图所示。首先将来自控制器的信号送到综合放大电路板(该插件板能对控制信号进行隔离),与升力反馈信号进行代数求和、校正、放大,然后再与鳍角反馈信号进行二次代数求和、校
《PLC在仿生鱼鳍随动系统中的应用》由会员壹****1分享,可在线阅读,更多相关《PLC在仿生鱼鳍随动系统中的应用》请在金锄头文库上搜索。
巩固发展创建文明城市工作情况汇报
留守儿童帮扶计划书
药品补充申请办事指南优秀范文五篇
初级银行从业《风险管理》考前(难点+易错点剖析)押密卷答案参考90
新教材八年级数学上册 1.1.1 探索勾股定理教学案北师大版
2023年农村房屋转让合同(份范本)
驾驶员年终工作总结范本(5篇).doc
2022年11月广东外语外贸大学门诊部公开招聘1名非事业编制工作人员笔试参考题库(答案解析)

购买土地合同样本(九篇).doc

小学一年级下学期少先队工作总结
小学六年级数学列方程解稍复杂的分数应用题教案
县领导城市管理会议讲话模板(2篇)
云南省迪庆州香格里拉中学2019-2020学年高一物理上学期期末考试试题
环保的工作总结范文5篇

黑龙江医保服务项目可研报告【参考模板】
临水临电专项施工方案
二手车买卖合同协议书范文(六篇)
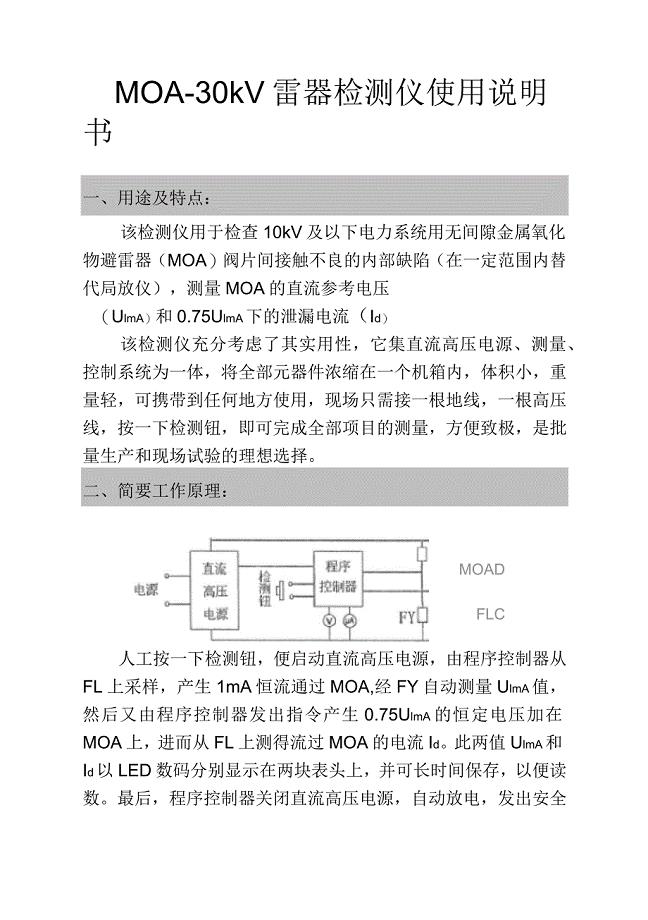
MOA-30KV避雷器检测仪使用说明书
开幕式表演解说词

×××农电局供电所制度
 食堂合伙经营协议书范本
食堂合伙经营协议书范本
2023-05-07 2页
公司保洁人员管理制度
2023-08-20 9页
2020年上半年慈善事业促进和社会工作科工作总结
2023-05-20 5页
财务风险控制与防范管理办法.doc
2023-04-05 6页
小针刀治疗技术操作规范
2023-08-10 4页
自动报警系统施工方案(完整版)
2023-05-09 43页
新概念英语第一册练习题.docx
2023-05-25 101页
文旅局食品安全工作总结汇报
2023-09-30 3页
保险代理公司筹建计划书
2022-11-05 4页
云大微生物复试经验.docx
2024-02-23 8页