
自动控制原理加粗字集合
4页
1、自控概念第一章1. 线性自动控制系统的稳定性是由系统结构和参数所决定的,与外界因素无关。第二章2. 系统传递函数的极点就是系统微分方程的特征根,因此它们决定了所描述系统自由运动的形态,称之为模态,而且在强迫运动中(即零初始条件响应中)也会包含这些自由运动的模态。3. 传递函数的极点可以受输入函数的激发,在输出响应中形成自由运动的模态。4. 传递函数的零点并不形成自由运动的模态,但它们却影响各模态响应中所占的比重,因而也影响响应曲线的形状。5. 在简化过程中应遵循变换前后变量关系保持等效的原则。6. 两个方框串联连接的等效方框,等于各个方框传递函数之乘积。7. 两个方框并联连接的等效方框,等于各个方框传递函数的代数和。第三章8. 所谓典型输入信号,是指根据系统常遇到的输入信号形式,在数学描述上加以理想化的一些基本输入函数。9. 系统对输入信号导数的响应,就等于系统对该输入信号响应的导数;或者系统对输入信号积分的响应,就等于系统对该输入信号响应的积分,而积分常数由零输出初始条件确定。10. 如果在所有的闭环极点中,距虚轴最近的极点周围没有闭环零点,而其他闭环极点又远离虚轴,那么距虚轴最近的
2、闭环极点所对应的响应分量,随时间的推移衰减缓慢,在系统的时间响应过程中起主导作用,这样的闭环极点就称为闭环主导极点。11. 所谓稳定性,是指系统在扰动消失之后,由初始偏差状态恢复到原平衡状态的性能。12. 大范围稳定系统 小范围稳定系统13. 若线性控制系统在初始扰动的影响下,其动态过程随时间的推移逐渐衰减并趋于零(原平衡工作点),则称系统渐近稳定,简称稳定;反之若在初始扰动影响下,系统的动态过程随时间的推移而发散,则称系统不稳定。14. 线性系统稳定的充分必要条件是:闭环系统特征方程的所有根均具有负实部;或者说,闭环传递函数的极点均位于左半s平面。15. 使线性系统稳定的必要条件是:在特征方程D(s)=a0sn+a1sn-1+an-1s+an=0,a00中,各项系数为正数。16. 线性系统稳定的充要条件:劳斯表中第一列各值为正。如果劳斯表第一列中出现小于零的数值,系统就不稳定,且第一列各系数符号的改变次数,代表特征方程的正实部根的数目。17. 只有当系统稳定时,研究稳态误差才有意义;对于不稳定的系统而言,根本不存在研究稳态误差的可能性。18. 控制系统的稳态误差定义为误差信号e(t)
3、的稳态分量ess(),常以ess简单标志。19. 速度误差指系统在速度(斜坡)输入作用下,系统稳态输出与输入之间存在位置上的误差。20. 加速度误差是指系统在加速度函数输入作用下,系统稳态输出与输入之间的位置误差。21. 在反馈控制系统中,设置串联积分环节获增大开环增益以消除或减小稳态误差的措施,必然导致降低系统的稳定性,甚至造成系统的不稳定,从而恶化系统的动态性能。第四章22. 根轨迹简称根迹,它是开环系统某一参数从零变到无穷时,闭环系统特征方程式的根在s平面上变化的轨迹。23. 对于单位反馈系统,闭环系统根轨迹增益就等于开环系统根轨迹增益。24. 对于单位反馈系统,闭环零点就是开环零点。25. 相角条件是确定s平面上根轨迹的充要条件。26. 根轨迹起于开环极点,终于开环零点。27. 根轨迹的分支数(对称于实轴)、对称性和连续性。28. 根轨迹的渐近线就是s值很大时的根轨迹,因此渐近线也一定对称于实轴。29. 实轴上的某一区域,若其右边开环实数零、极点个数之和为奇数,则该区域必是根轨迹。30. 根轨迹的分离点与分离角。31. 根轨迹的起始角:根轨迹离开开环复数极点处的切线与正实轴的夹
《自动控制原理加粗字集合》由会员m****分享,可在线阅读,更多相关《自动控制原理加粗字集合》请在金锄头文库上搜索。

安康杯竞赛活动总结范文
四川省雅安市天全中学2015-2016学年高二语文下学期第二周周考试题(含解析)
06中考语文课外阅读(5)部编人教版九年级下册
放缩法的应用技巧复习课程
2023年金工实习报告15篇
机房建设实施方案详细版
优化政务环境优秀演讲词
专利申请转让协议书标准模板(2篇).doc
2021年12月海南省万宁市万宁中学公开招聘教师4名工作人员专用模拟卷(第9套)
护士工作计划参考范本(二篇).doc
庆祝2022元旦节的主题班会教案模板2022
单神经元PID多变量解耦控制专题研究
百科全说——林海峰博士的营养学
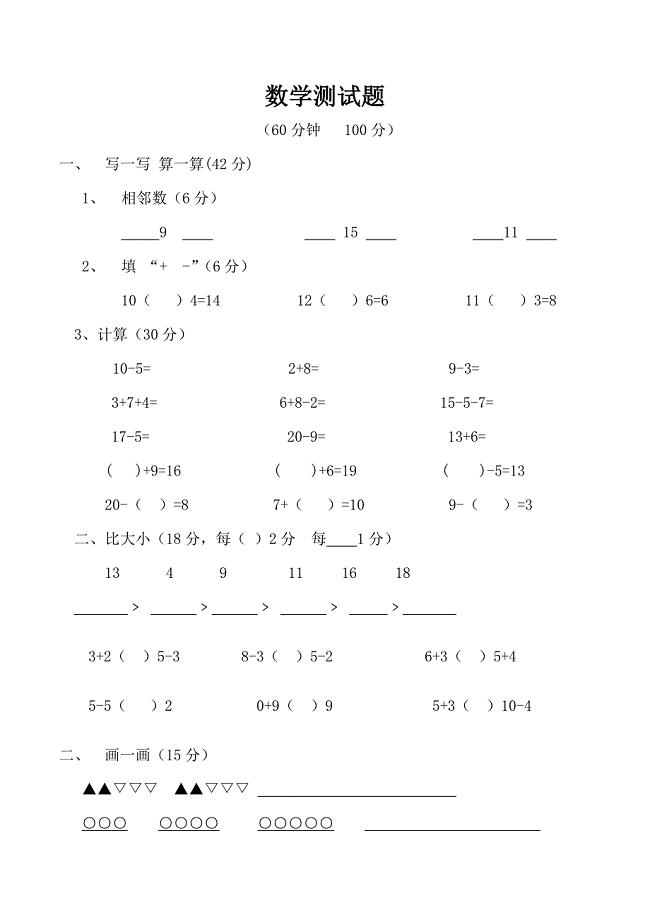
幼小衔接数学测试卷
关于员工劳动合同的解除和终止问题
中考英语定语从句系统讲与练外研版
论软件测试在软件工程中的作用
高中频热处理用淬火介质的选用
固定资产及低值易耗品管理办法同名
外研版英语初一下册暑假作业答案
 使用域名访问Web(虚拟机操作)
使用域名访问Web(虚拟机操作)
2023-11-21 11页
HSG系列液压缸样本(16MPa)资料
2023-07-08 23页
鼠标、软驱、打印机、硬盘、风扇
2024-01-25 10页
昆明斌创科技网络营销服务
2023-07-17 2页
感应加热电源的控制与驱动电路
2023-02-18 3页
高低压开关柜相关知识
2022-08-20 9页
硕士电网络课程课后拓展作业题
2023-05-13 6页
多功能抑尘车原理介绍
2023-03-19 2页
用于FANUC数控系统的DNC软件
2024-03-15 4页
变压器差动保护电流互感器接线方式
2023-04-07 7页