
仿蜥蜴机器人设计与制作
56页
1、北京理工大学珠海学院2020届本科生毕业设计仿蜥蜴机器人设计与制作控制部分设计 控制部分设计摘 要仿生技术出现至今已有数十载,而仿生学是应用生物学领域的一门分支学科,软硬件的相互结合赋予了机器人另一种形式的“生命力”。本次毕业设计是通过研究蜥蜴的外形和运动姿态所设计与制作的仿蜥蜴机器人。根据步态分析和自由度的计算,设计结构外形和基本运动姿态,通过电路设计和程序写入去控制各运动副的关节运动,并且通过仿真优化和上位机的调试优化得到能满足运动要求的仿蜥蜴机器人。关键词:仿生技术,电路设计,优化,关节运动Design and manufacture of lizard - like quadruped robotControl system designAbstractIt has been decades since the advent of bionic technology, and bionics is a branch discipline in the field of applied biology. The combination of software and hardwa
2、re endows robots with another form of vitality. This graduation project is a lizard robot designed and made by studying the appearance and movement of lizards. According to the analysis of gait and the calculation of degree of freedom, the design of the structure shape and the basic motion posture, through the circuit design and program writing to control the joint motion of each motion pair, and through the simulation optimization and the upper computer debugging optimization can meet the motio
3、n requirements of the lizard robot.Key words: bionic technology, circuit design, optimization, joint motion目录1绪论11.1研究仿生蜥蜴机器人的现实意义和目的11.2国内外的发展状况对于仿生蜥蜴机器人12仿生蜥蜴机器人步态设计42.1行走原理42.2 自由度计算42.3步态分析53硬件模块介绍73.1硬件选用73.2 硬件系统框图73.3舵机选型83.4微处理器选型93.5舵机控制板选型123.6电源选型153.7超声波测距模块选型153.8 硬件系统电路设计164开发软件介绍174.1 Arduino IDE174.1.1 Arduino IDE软件介绍174.1.2 Arduino IDE界面展示184.1.3 Arduino IDE数据类型204.2 Lobot Servo Control204.3 Solidworks214.4 ALTIUM DESIGNER225控制系统软件设计245.1软件系统设计基本流程框图245.2运动组软件设计265.2.1运动组方案设计265
4、.2.2 舵机偏差调整265.3动作组各参数275.3.1 前进275.3.2 后退285.3.3 转向295.4 程序代码305.4.1 程序结构流程图305.4.2 程序代码336调试过程386.1 16路PWM舵机驱动板从机内部资源386.2 Arduino主机内部资源396.2.1超声波测距模块396.3 整体运行调试40总结41参考文献42谢辞43附录44附录一.程序完整代码44附录二.电路原理图501绪论1.1研究仿生蜥蜴机器人的现实意义和目的代替人类在各种复杂和未知的工作环境中工作,国际社会对此表示赞成的声音越来越多,例如深海勘测,核辐射影响地区,对于恐怖组织所在地区,太阳系和各遥远星系人类所不可及之处。往小的方面说,需要机器人解放人类的劳动力,提高工作效率,例如负重搬运,运送物资,工厂生产,交通维护等都可以使用机器人代替人类社会工作。而四足机器人相比于两足机器人而言,具有更强的稳定性和良好的机动性,而相对于六足机器人而言,在构建和维护上又比六足更简单。而制作一台机器人的最终目的就是让它应用在我们的生活之中,模拟爬行动物的运动特征,通过机械结构和算法程序赋予其“生命”,使
《仿蜥蜴机器人设计与制作》由会员壹****1分享,可在线阅读,更多相关《仿蜥蜴机器人设计与制作》请在金锄头文库上搜索。
2023年安徽省房地产经纪人维护相邻不动产安全考试题
柠檬酸金钾市场调查及发展的研究报告
三分钟英语自我介绍
君聪特纯奶茶配方 (2)
请假条标题
![常用电气简图图形符号[指南]](https://union.152files.goldhoe.com/2023-6/28/cbff861b-1b16-4194-adb6-6eb6399fc77f/pic1.jpg)
常用电气简图图形符号[指南]
粤教版小学科学六年级上册复习试卷(分单元)
医院爱国卫生工作总结 篇11
6上教案人教版六年级数学上册全册表格式教案(最新全套)
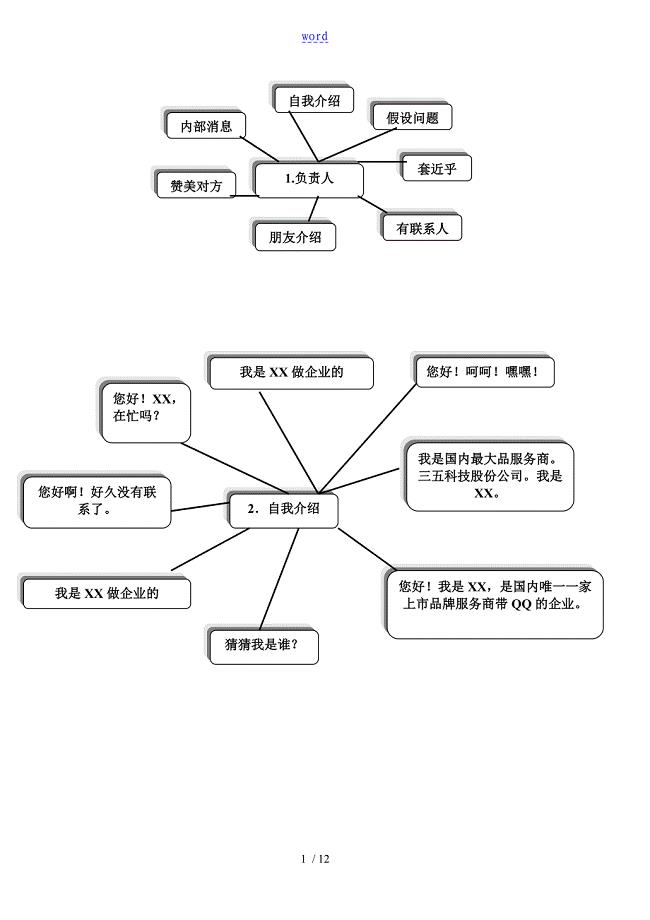
销售的思维导图
7年级的体育教学计划(3篇).doc
小学庆六一活动总结范本(4篇).doc
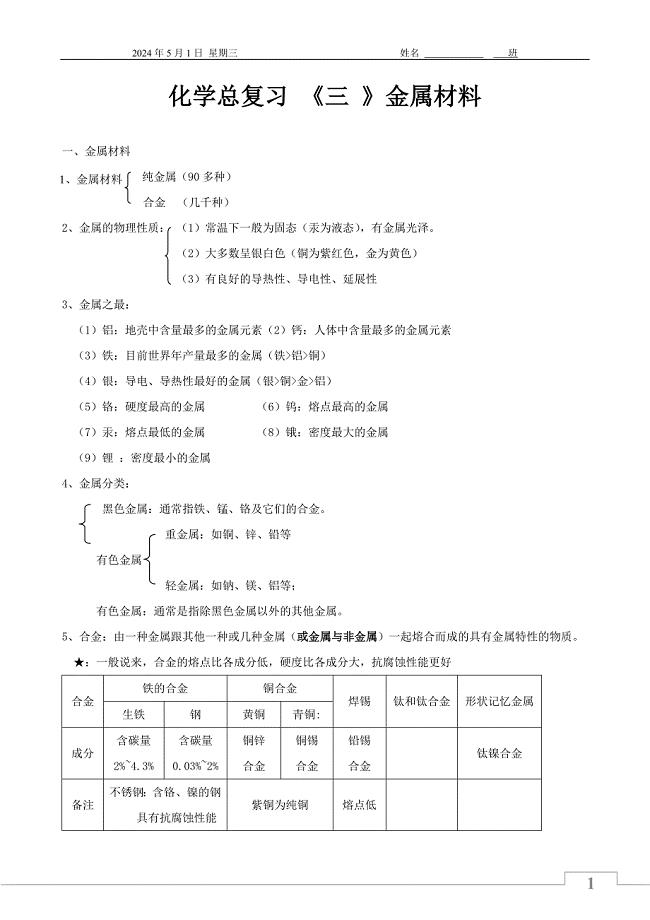
中考化学总复习三 金属和金属材料 学生版
房屋装饰装修合同(6篇)
2021年度政教处工作计划范文.doc
2022广西南宁市青秀区人民政府办公室公开招聘外聘人员5人模拟试卷【附答案解析】(第9卷)
公司发展战略规划书(案例)
电工基础知识考试历年真题汇总含答案参考56
小学四年级班规班约
2018年秋七年级数学上册第二章整式的加减章末随堂检测新版新人教版
 王冠对电视节目视觉设计趋势的观察与思考(2)(2)
王冠对电视节目视觉设计趋势的观察与思考(2)(2)
2023-12-23 12页
我国小额贷款公司发展现状与发展对策研究
2023-07-05 20页
学生成绩管理系统设计与实现课程设计报告
2023-04-30 41页
毕业设计(论文)-发动机曲轴连杆机构仿真及有限元分析设计-adams
2023-10-07 51页
毕业设计(论文)-果园水果采摘升降平台的设计(全套图纸)
2022-09-15 12页
农业银行施工组织设计
2023-10-08 140页
国际合资经营企业
2023-06-17 13页
土木工程毕业设计(论文)-长春百家商务宾馆建筑结构施工设计
2023-01-23 98页
信息与计算科学-购物车管理系统的设计与开发论文
2023-11-08 29页
浅谈知识产权在土木工程中的作用及问题
2023-12-08 15页