
电瓷帽设计与计算
16页
1、机械原理课程设计电瓷帽坯件成型机设计者学号: 姓名:学号: 姓名:学号: 姓名:指导老师:骆祎岚年月日星期1.设计题目32.机器的功能分析 43.运动方案设计 44.运动方案的评价及选定75.机器的运动循环图86.执行机构的设计与分析 87.运动曲线 108.自编程序 149.参考资料 18设计题目 电瓷帽是变配电设备的一个重要零件,属系列产品,是易损件之一,其外形尺寸如下图所示。它由瓷土做成圆柱形状,并在上端挖有凹孔成“帽”;坯件晾干后再烧成瓷器。使用时将电瓷帽翻盖在金属导杆的顶(尾)端,将起到绝缘和安全保护作用。电瓷帽的成型制作必须完成5个动作:(1) 填料并刮平。(2) 转模输送物料。(3) 坯件经冲压成型。(4) 坯件脱模。(5) 坯件输送。原始数据及设计要求如下:(1) 生产能力:3000只/h。(2) 电瓷帽尺寸:高60mm、外径60mm、孔径20mm、孔深25mm。(3) 驱动电机:Y90S4,功率p=1.1kW,转速n=1400r/min。(4) 电瓷帽坯件成型机一般至少包括凸轮机构,齿轮机构,连杆机构等在内的3种机构,冲压机构应具有增力功能。机器的功能分析首先,填料机
2、构填料,之后,由槽轮带动工作台转动180度,使填好料的模型孔刚好对着正上方的冲压机构,转动的过程中同时进行了刮平。当填好料的模型孔对着冲压机构时,采用六杆增力机构的冲压机构向下运动可完成坯件的冲压成型。这段时间内,底盘脱模凸轮处于近休止阶段。冲压机构返回的同时,底盘的推杆由于凸轮的升程运动向上运动,从而使圆盘沿着孔壁向上运动,达到坯件脱模的目的。凸轮运动到最大位移时,远休止0.5秒。机构在凸轮推动下将成型的坯件推到传送带上。由于脱模凸轮运动,圆盘回到初始位置。在转盘转动180度之后至脱模结束这段时间,填料机构填料完毕,进行新一轮循环。运动方案设计方案一:1、 组成:六杆増力机构、冲压模型及脱模机构、转盘、填料及刮平机构、抽底盘机构、槽轮机构、齿轮系、凸轮机构2、 功能原理:首先,由填料机构填料;其次,槽轮带动工作台转动180,使得冲压机构与填好料的模型孔正对,并且在转动工作台的时候进行了刮平的步骤。当填好料的模型孔正对着冲压机机构时,连有六连杆机构的冲压模型机构的内芯向下压,靠着末端带有的垫片带动外轴下降,完成坯件的冲压成型。冲压机构由槽轮机构控制运动,这时停在原位。待底下的底盘被抽走
3、之后,冲压机构的外轴在凸轮的带动下,对坯件进行挤压,使它冲压下来,到达传送带上。3、 机构简图:方案二:1、 组成:六杆増力机构、冲压模型、转盘、填料及刮平机构、将成型机构推到传送带机构、凸轮脱模机构、槽轮机构、齿轮系2、 功能原理:见功能分析3、机构简图:方案三:1、 组成:偏置曲柄滑块机构、冲压模型、转盘(三等分型)、填料及刮平机构、脱模机构、槽轮机构、齿轮系2、 功能原理:首先由填料机构填料,其次工作台转120,使得冲压机构正好与填好料的模型孔相对,并且工作台转动的同时完成了刮平的步骤。而后连有偏置曲柄滑块机构的冲压机构向下压,完成坯件的冲压成型。而后冲压机构上移,工作台转180,脱模杆对坯件挤压脱模,送到传送带上。3、 机构简图:运动方案评价及选定方案一:优点:机构简单,易于建模和实际生产加工。缺点:运动复杂,时间配合较难,脱模时坯件离传送带有一段距离,可能会使坯件受损。方案二:优点:运动相对简单,时间配合简单,坯件不容易损坏。缺点;机构相对复杂,建模困难。方案三:优点:结构简单,思路思路清晰。缺点:脱模时坯件离传送带有一段距离(同方案一),无增力功能。机器的运动循环图执行机构
《电瓷帽设计与计算》由会员cl****1分享,可在线阅读,更多相关《电瓷帽设计与计算》请在金锄头文库上搜索。
高中副校长竞聘演讲稿范文(4篇)

学校行政办公室主任竞职演讲稿模板(4篇)
《沉香救母》课本剧
关于的平安承诺书三篇
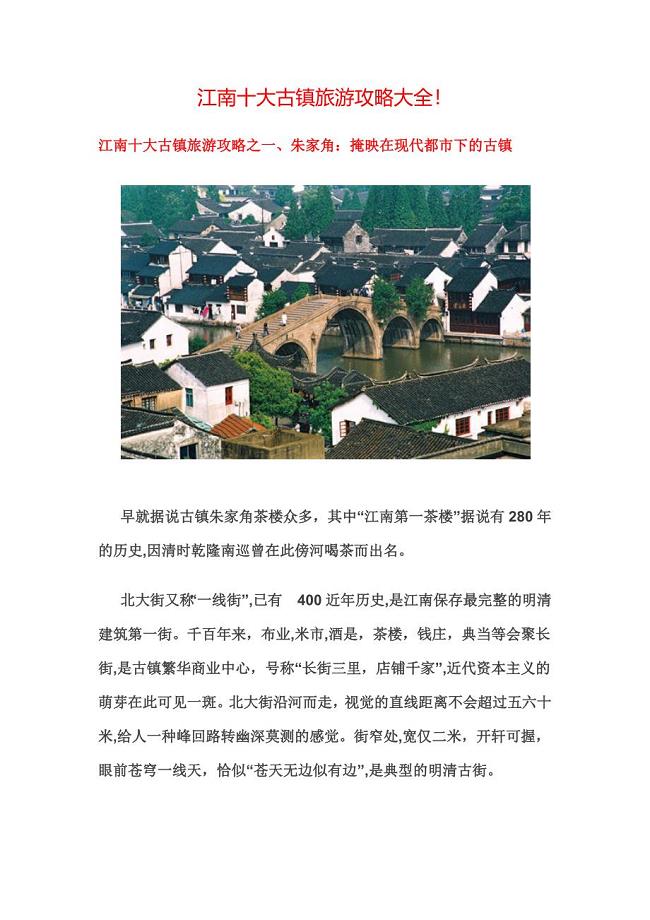
江南十大古镇旅游攻略大全!
主任环境/职业健康安全作业指导书(优选版)(DOC 11页)
演讲协会办公室的工作总结.doc
50m架桥机轨道计算书
2023年四川省绵阳市安州区高川乡社区工作人员考试模拟试题及答案
大学物理课件第八章
宜昌市实验幼儿园小班上学期期中考试试卷附答案
拨叉加工工艺卡片完整新版
淮安环球好食汇
【幻想格言 励志短句】有关幻想格言
同学会外联部部长申请书-条据书信
微机原理考试复习题

特装施工申报表必填
清水河龙阴寨滑坡应急调查报告
大学生职场礼仪讲座策划方案
幼儿园大班下学期工作总结标准范文(4篇).doc
 门式钢架规范的规定
门式钢架规范的规定
2022-11-24 10页
压力容器及压力管道知识培训材料之八压力容器、压力管道使用管理基本知识
2023-12-02 15页
承包经营合同范本
2023-07-02 4页
PWM逆变电路设计
2023-04-04 19页
施工方案(渔船保温防腐)
2023-12-19 19页
SF6高压断路器状态评价导则编制说明
2023-04-21 8页
超前小导管施工作业指导书
2023-03-21 10页
因公用车车补方案
2024-02-17 6页
小学体育立定跳远教学设计及教案
2024-01-06 7页
建筑起重机械安全管理制度
2022-11-12 7页