
坐标方位角推算
41页
1、第七章 小地区控制测量 第一节 控制测量概述 第二节 平面控制网的定位和定向 第三节 导线测量和导线计算 第四节 交会定点 第五节 三、四等水准测量,第一节 控制测量概述 测量工作必须遵循的组织原则“从整体到局部”,“先整 体后碎部”的原则。所谓“整体” ,就是指控制测量。 控制测量的目的在整个测区范围内用比较精密的仪器 和方法测定少量大致均匀分布点的精确位置。 控制测量分为平面控制测量和高程控制测量。,一. 平面控制测量 平面控制测量是确定控制点的平面位置。 平面控制网的建立常用的方法为三角测量和导线测量。,国家平面控制网是在全国范围内建立的控制网。逐级控制,可分为一、二、三、四等三角测量和精密导线测量。它是全国各种比例尺测图和工程建设的基本控制; 城市平面控制网是为大比例尺地形测量建立的控制网,可分为二、三、四等三角网或一、二、三级导线测量等,可作为城市规划,施工放样的测量依据。 二.高程控制网 高程控制网的建立方法主要是水准测量,在山区等地形起伏较大的地方可采用三角高程测量建立高程控制网。 国家水准测量分为一、二、三、四等,其中一、二等水准测量成果可作为全国范围的高程控制。 城市
2、水准测量可分为二、三、四等水准测量及直接为测量地形图用的图根水准测量。,第二节 平面控制网的定位和定向 坐标方位角(方向角) 在平面直角坐标系统内,以平行于X轴的方向为基准方向, 于某边的一个端点,从基准方向顺时针转至该边的水平角称为 坐标方位角,称为A、B两点间 (AB边)的正、反坐标方位 角,并且存在下列关系:,二.坐标方位角的推算,三. 坐标正、反算 1.坐标正算公式 已知边长和方位角,由已知点计算待定点的坐标,称为 坐标正算。 如图,A为已知点,其坐标为x、y, A到待定点B的边长为 (平距), 方位角为 ,则B点坐标为: 式中: 为坐标增量。,2. 坐标反算公式 已知两点坐标,反求边长和方位角,称为坐标反算。 方位角公式为:,第三节 导线测量和导线计算 导线测量的布设形式有: (1)闭合导线 导线的起点和终点为同一个已知点,形成闭合多边形。 (2)附合导线 敷设在两个已知点之间的导线称为附合导线。 (3)支导线 支导线从一个已知点出发不回到原点,也不附合到另外已知点。 由于支导线无法检核,故布设时要非常仔细,规范规定支导线 不得超过三条边。,导线测量外业工作 (一) 踏勘选点
3、及建立标志 选点的注意事项: 1. 相邻导线点间通视良好,便于测角,量边。 2. 导线点应选在土质坚硬,能长期保存和便于观测的地方。 3. 导线点视野开阔,便于测绘周围地物和地貌。 4. 导线边长应大致相等,避免过长、过短、相邻边长之比不应超过三倍。 5. 导线点应有足够的密度,分布较均匀,便于控制整个测区。,(二) 边长测量 导线边长可以用检定过的钢尺丈量,一般用双次丈量的方 法,往返丈量的相对精度不得低于1/3000,特殊困难地区允许 1/1000,并进行倾斜改正。 (三) 角度测量 导线角度测量有转折角测量和连接角测量。 导线应与高级控制点连测,才能得到起始方位角,这一工作称 为连接角测量,也称导线定向。 目的是使导线点坐标纳入国家坐标体系或该地区统一坐标系统。,二. 导线测量业内计算 (一) 附合导线计算 由于附合导线是在两个已知点上布设的导线,因此测量成果应满足两个几何条件。,方位角闭合条件 即从已知方位角 ,通过各 角推算出CD边方位角 ,应与已知 方位角 一致。 坐标增量闭合条件 即从B点已知坐标 ,经各边长和方位角推算求得的C点坐标 应与已知C点坐标 一致。 其计算步骤
《坐标方位角推算》由会员小**分享,可在线阅读,更多相关《坐标方位角推算》请在金锄头文库上搜索。
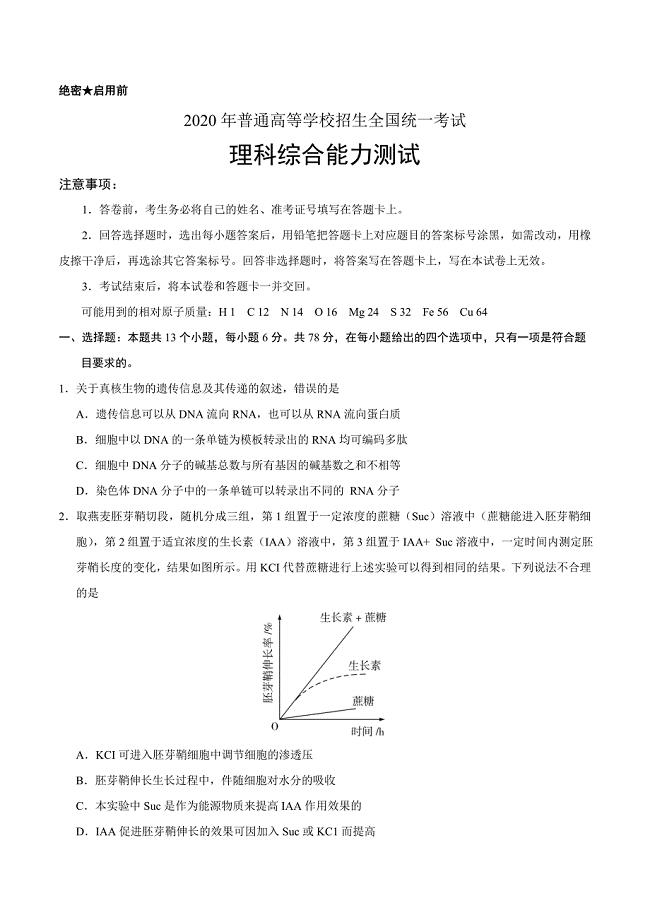
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 企业高效开会秘诀
企业高效开会秘诀
2024-01-31 15页
管理者的职责认知
2024-01-31 21页
高效会议秘诀培训PPT
2024-01-31 37页
项目管理流程(5大过程)
2024-01-31 30页
商业分析工具:战略分析与规划工具(精品)
2024-01-31 22页
商业分析工具:由商业问题到最终成果
2024-01-31 48页
管理者的自我成长
2024-01-31 32页
项目管理流程培训PPT
2024-01-31 40页
商业分析工具:销售数据分析方法
2024-01-31 31页
会议管理知识
2024-01-31 20页