
机器人操作指南-图文-
10页
1、第七章 工业机器人应用一 机器人示教单元使用1. 示教单元的认识 2. 使用示教单元调整机器人姿势2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。 2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1-J6关节对应的按键可使机器人以关节为运行。按动“OVRD”和“OVRD”能分别升高和降低运行机器人速度。各轴对应动作方向好下图所示。当运行超出各轴活动范围时发出持续的“嘀 嘀”报警声。 2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示: 直交调整模式 TOOL调整模式 三轴直交调整模式 圆桶调整模式2.4 在手动运行模式下按“HAND”进入手爪控制界面。在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900OUT-90
2、7进行控制,与之相应的还有八路输入信号IN-900IN-907,以上各I/O信号可在程序中进行调用。按键“+C”和“C”对应“OUT-900”和“OUT-901” 按键“+B”和“B”对应“OUT-902”和“OUT-903” 按键“+A”和“A”对应“OUT-904”和“OUT-905” 按键“+Z”和“Z”对应“OUT-906”和“OUT-907” 在气源接通后按下“C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。3. 使用示教单元设置坐标点3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列: J1:0.00 J5:0.00 J2: -90.00 J6:0.00 J3:170.00 3.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。然后按下“F1”键进入界面中。此时共有个5项目可选,可使用右侧的“”、“”、“”和“”键移动光标到相应的选项,然后
3、按下“EXE”键进入选项。或者按面板上的数字键直接进入相应的选项中。在此按“1.FILE/EDIT”键进入文件/编辑界面。3.3在进入界面后先选择需进行编辑的程序,再按下“F2”键进入(位置点POS.)编辑界面,再按下“F2”键对应的“POSI.”进入位置点编辑界面。分别按动“F3”和“F4”键,对应的功能是“Prve”和“Next”,可向前或向后选择程序中所有的位置点,在此操作时选择P0点。3.4按下“F2”键进行“TEACH”示教,此时有确定对话框进行YES/NO选择,按“F1”选择YES进行保存。至此程序中对应的P0位置点已经确定。按操作可对程序中其它位置点进行示教保存。4. 使用示教单元修改、编辑程序4.1以样例程序TTT6为例,分别将第37段程序Dly 0.9修改为Dly1.2、第46段程序Mvs p1修改为Mov p1。4.2按照3.2的操作步骤进入界面。4.3先选择需进行编辑的程序TTT6,再按下“F1”键进入(程序PROGRAM)编辑界面,画面显示出选择的程序。按右侧的“”、“”键移动光标选择的程序段37(若程序中有中文注释时会以日文方式显示,对程序执行无影响)。4.3
4、按“F1”键进入编辑界面对程序段进行修改,此时光标在“3”字处闪,表示此字符可进行修改。按“”和“”键可移动光标,连续按“”键10次后光标移动到“0后面,再按“CLEAR”键可清除光标前面的字符,按动4次后将“0.5”清除,再分别按下数字键“1”、“.”“2”,最后按下“EXE”键完成此程序段的修改。 4.4选择程序段46并进入编辑界面,按“CHARACTER”键切换为字母输入方式(显示ABC为字母输入方式,显示123为数字输入方式),移动光标到“v”处并按“CLEAR”键将其清除,再按数字键“6”,按一次输入为“M”,按二次输入为“N”,多次按下可在“O”、“m”、“n”、“o” 之间切换,在输入“O”后再按“”键,选择字符“s”,按“CLEAR”键将其清除,再按三次数字键“8”,修改字符为“V”。最后按“EXE”键程序段修改为“46 MOV P1”5. 使用示教单元设置原位值5.1当机器人本体经过碰撞或者更换过电池后,各伺服电机绝对编码器的数值会发生改变,与之对应的坐标点会偏移或者出现错误,此时可以通过重新输入编码器坐标数值进行校正。5.2每台机器人的编码器数值表在样例程序中以注释
《机器人操作指南-图文-》由会员jiups****uk12分享,可在线阅读,更多相关《机器人操作指南-图文-》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
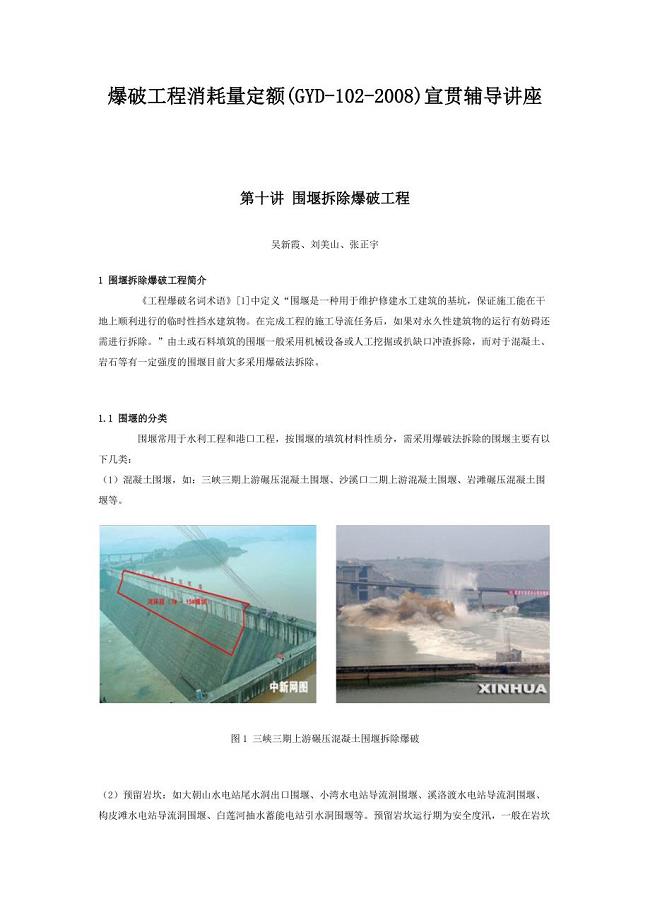
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
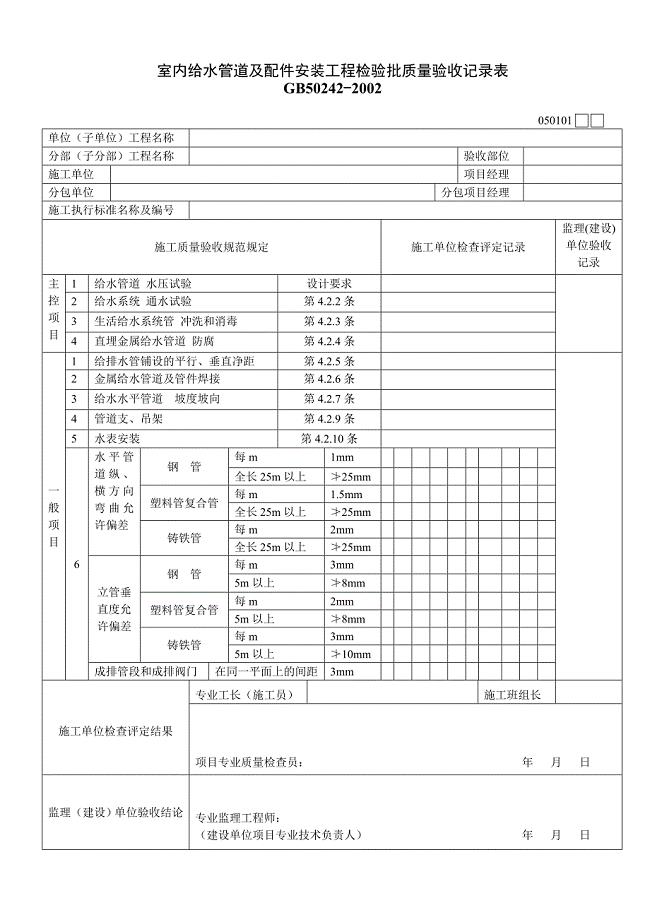
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页