
基于arm清洁机器人控制系统研究
65页
1、东南大学 硕士学位论文 基于ARM的清洁机器人控制系统研究 姓名:耿平 申请学位级别:硕士 专业:机械电子工程 指导教师:张赤斌 20080403 摘要 摘要 基于A R I e l 的清洁机器入控制系统研究 研究生:耿平指导老师:张赤斌副教授 ( 东南大学机械工程学院,南京) 家用清洁机器人是当今服务机器人领域的一个热门的研究方向,它涉及了当前多项人工 智能技术。从理论和技术角度讲,清洁机器人比较具体的体现了移动机器人的多项关键技术, 具有较强代表性;从市场前景角度讲,清洁机器人大大降低了劳动强度,提高了劳动效率, 适用于宾馆、酒店、图书馆、办公场所和家庭。因此,开发自主智能清洁机器人既具有科研 上的挑战性又具有广阔的市场前景。 首先,本文简要介绍了清洁机器入的机械结构,并对两轮驱动三轮结构的清洁机器人进 行了运动学分析和动力学分析,为清洁机器人的运动控制和定位技术的分析打下理论基础。 其次,本文重点阐述了清洁机器人底层控制系统的设计和实现。按照模块化设计的思想, 详细分析了以A R M 嵌入式微处理器为核心的中央控制系统模块、避障模块、电机驱动模块、 测速模块、清扫模块和遥控等模块
2、的电路设计和软件编程,并讨论了系统可靠性问题。 最后,深入研究了清洁机器人的定位系统,并提出了将绝对定位和相对定位相结合的定 位方法。在算法分析和理论建模的基础上,设计了基于n R F 2 4 0 1 无线收发模块和超声波测 距技术的绝对定位系统,并取得了很好的定位效果。 关键字:清洁机器人,控制系统,A R M 处理器,定位技术 东南大学硕士学位论文 A b s t r a c t R e s e a r c ho nC o n t r o lS y s t e mo fC l e a n i n gR o b o tB a s e do nA R M C a n d i d a t ef o rM a s t e r :G e n gP i n g A d v i s e r :A s s o c i a t eP r o f Z H A N GC h i - b i n ( S o u t h e a s tU n i v e 璐i 慨N a n j i n g ) T h es t u d yo fc l e a n i n gm o b i l er o b o t si s
3、av e r yh o ti s s u ei nt h ef i e l do fm o b i l er o b o t s I t i n v o l v e sp l e n t yo fc u r r e n tA r t i f i c i a lI n t e l l i g e n c et e c h n o l o g i e s I nv i e wo f t h e o r ya n dt e c h n o l o g y , t h ec l e a n i n gm o b i l er o b o te m p l o y sm a n yk e ym o b i l er o b o tt e c h n o l o g i e s I tc a l lg r e a t l yr e d u c et h e b u r d e no ft h eh o u s e w o r k , S Oi ti sv e r ya p p l i c a b l ei nh o t e l s ,h o s p i t a l s ,l i b r a r i
4、 e s ,o f f i c e sa n dh o u s e s T h e r e f o r e ,t h er e s e a r c ho nt h ec l e a n i n gm o b i l er o b o t si sar e a lc h a l l e n g ei ns c i e n t i f i cs t u d ya n d c o m m e r c i a la p p l i c a t i o n s F i r s t l y , t h ef r a m eo f t h ec l e a n i n gm o b i l er o b o ti si n t r o d u c e db r i e f l y T h e ni t sm o t i o na n d d y n a m i cm o d e l sa r eb u i l t , w h i c hp r o v i d e st h e o r i e sf o rt h ef o l l o w i n gd e s i g no fh a r d w a
《基于arm清洁机器人控制系统研究》由会员第***分享,可在线阅读,更多相关《基于arm清洁机器人控制系统研究》请在金锄头文库上搜索。
校园足球汇报
异甘草酸镁注射液【治疗急性药物性肝损伤】Ⅱ期临床研究总结
云教室课程行政伦理学行政良心

语文S版小学二年级语文下册诺亚方舟课件优质课教学课件
未来中考趋势作文考与练
近年来广东历史试题中考易错点分析与教学启示

搜索推广那些事

小学语文二年级上册红领巾真好说课稿设计(说课设计)

新课标人教版二年级语文上册红领巾真好课件

新课程背景下的高中化学课堂教学改革

危机管理与突发事件应对

背影朱自清教案课件二课时
突发公共卫生事件培训
统计学简史及数据科学中南财经大学

水泥混凝土路面技术现状及发展终
有家真好作文讲评课
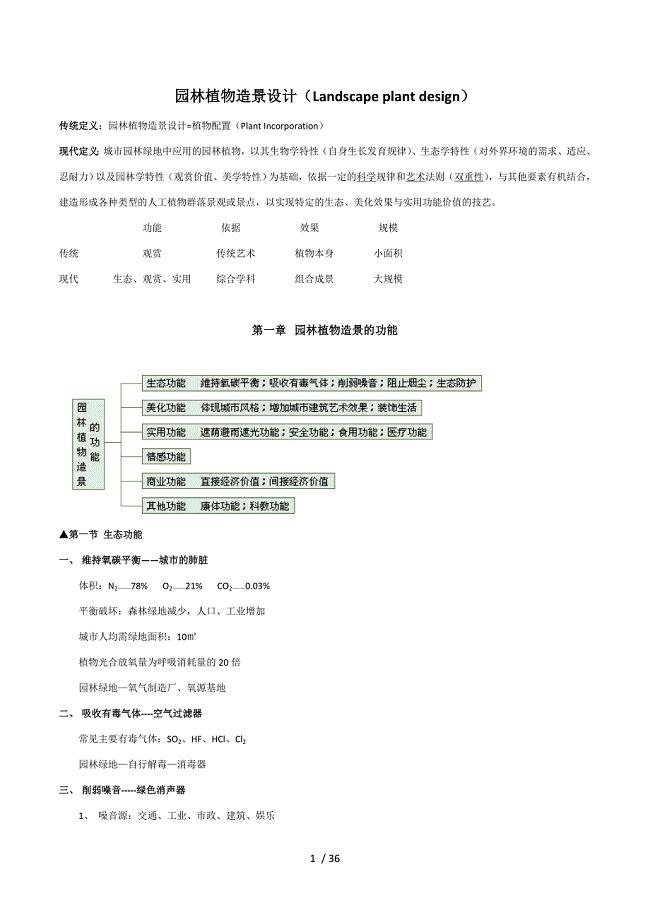
西南大学植物造景设计总复习
海外汉语教学新探索在线交流学习平台Goclef

动态黑色背景年终总结模板
孙子的治军之道与现代管理谋略总结
 四川省十三五休闲度假旅游发展行动计划2016
四川省十三五休闲度假旅游发展行动计划2016
2024-02-17 12页
选址员基本工资及绩效考核办法
2023-03-22 4页
《食品生产加工小作坊生产许可证》申请书
2023-12-19 5页
.详细供货方案及质量保证措施-货物供货方案
2022-09-20 6页
煤矿调度室一季度工作总结
2023-07-09 3页
危险源LECD评价方法
2023-09-11 8页
450M无线列调
2022-08-18 20页
中控室管理制度(初稿).doc
2023-10-22 5页
中班探索性活动区游戏:簸箕棋.doc
2023-03-27 3页
生命教育校园文化特色学校创建汇报材料.doc
2024-02-12 5页