
运动控制课程设计
14页
1、运动控制课程设计:不可逆直流PWM双闭环调速系统学号:姓名:班级:自动化一班指导老师:运动控制课程设计1、给定条件、技术指标:系统形式:不可逆(无制动功能)直流PWM双闭环调速系统 直流电动机(他励、立此电路参数略):额定功率P为10KW、额定转速n为1500r/min、额定电流I为51.82A、额定电压 N N NU为220V、电枢电阻R为0.26Q、允许过载倍数入=1.5 系统总飞轮矩GD2: 10.a1Nm2测速发电机:额定转速为1900r/min、额定电压为110V、额定电流为0.21A 电流检测:采用霍尔电流传感器电枢回路总电阻(计及整流器的等效内阻等):R=3R 脉宽调制器的调制波周期T设计值(建议)为100b sPWM系统技术指标:调速范围D=20、静差率s0.05、电流超调量。5%、 空载启动到额定转速时的转速超调量。% INRCanNB为最大占空比错误!未找到引用源。选取6曲=2001Z三相桥式整流电压系数 错误!未找到引用源。 直流斩波器输入电压: 错误!未找到引用源。电枢回路平波电抗器为:错误!未找到引用源。 则错误!未找到引用源。错误!未找到引用源。一次测容量:
2、错误!未找到引用源。2、整流变压器的选择(1)整流二极管的选择 在一个电源周期中,整流器输出电流有6个波头,流过每一个二极管的是其中两个波 头,因此流过二极管电流有效值 错误!未找到引用源。 。 二极管承受的最大反向电压为线电压的峰值, 错误!未找到引用源。 。 考虑 3-5 倍的裕量,取整流二极管参数为:错误!未找到引用源。 。由此我选用了三菱公司的CM300DY-24A,此二极管的参数:uVD = 2oor(2)滤波电容的选择电机的额定功率为10KW,为了保证电压的纹波系数足够小,取滤波电容为几千uF级。 因此,选用4700Uf/450V的电容作为滤波电容。(3)IGBT 选择主电路正常工作电流为51.82A,主回路电源电压为180V,考虑到留有充分的裕量, 取IGBT 为 IR 公司的 IRKT162-12,其参数为 1200V/110A。其栅极电阻取为错误!未找到引用源。二、IGBT驱动电路的选用本系统IGBT的驱动电路采用美国IR公司的IR2110驱动器,它兼有光耦隔离(体积小) 和电磁隔离(速度快)的优点。输出端电压范围是10-20V,逻辑端电眼范围是5-15V。 工作频率
3、高达500kHz,开通、关断延时小,分别为120ns和94ns。由于设计要求错误!未找到引用源。,由公式错误!未找到引用源。可以计算得出。 但是一般锯齿波发生最好选取大电阻小电容或小电阻大电容组合。我这里选取 错误!未找到引用源。三、控制器设计计算1、脉宽调制集成电路的选用采用电压脉宽型PWM控制芯片SG3524A,以及IR2110驱动芯片,用功率开关器件IGBT 模块方案实现直流供电。SG3524A是电压型PWM集成控制器,外接元器件少,性能好,包括开关稳压所需的全部控制电路。其主要特性包括:外同步、软启动功能;死区调节、欠压锁定功能; 误差放大以及关闭输出驱动信号等功能;输出级采用推挽式电路结构,关断速度快 输出电流士400mA;可提供精密度为5V 士1%的基准电压;开关频率范围 100Hz-400KHz。其内部结构主要包括基准电压源、欠压锁定电路、锯齿波振荡器、 误差放大器等,如图所示。SG3524内部结构图2、电动机部分参数计算(1)电动机的电动势系数220 - 51.82 X 0.26=0.138/-mia/2)系统的机电时间常数:gd2r37SCeCm=0.12s10.1
4、X 3 X。立&375 X 0.1382 X 9.553、测速发电机部分参数的计算(1)根据测速发电机的额定数据,有110(2)电位器 RP 的选择方法如下: 为了使测速发电机的电枢压降对转速检测信号的有显著影响,取测速发电机输出最高电压时,其电流约为额定值的 20%,则0.0579 X 1500=2067.86fi0.2 X 0.21此时RP所消耗的功率为WRP2 = Gec5nN * 0.2IHtg = 0.0579 累 1500 X 0.2 X 0.21 = 3.6477IV错误!未找到引用源。选用错误!未找到引用源。的电位器。ce = %町吨=0.2 X 0.0579 = 0.01158K4、PWM部分参数计算(1) 电压放大倍数:错误!未找到引用源。(2) 延迟时间:错误!未找到引用源。(3) 传递函数为:错误!未找到引用源。5、调速系统稳态参数计算(1) 为满足调速系统的稳态性能指标,额定负载时的稳态速将为:错误!未找到引用源。(2) 求闭环系统应有的开环放大系数 开环系统的额定速降为:InR 51.82x 3 x 0.26_叽口二転二二网序仙M则闭环系统的开环放大系数应为
《运动控制课程设计》由会员人***分享,可在线阅读,更多相关《运动控制课程设计》请在金锄头文库上搜索。
热门机械租赁合同3篇
2023年幼儿园后勤计划措施
部门年度工作计划范文2
东郊热电厂五S管理清扫阶段实施细则
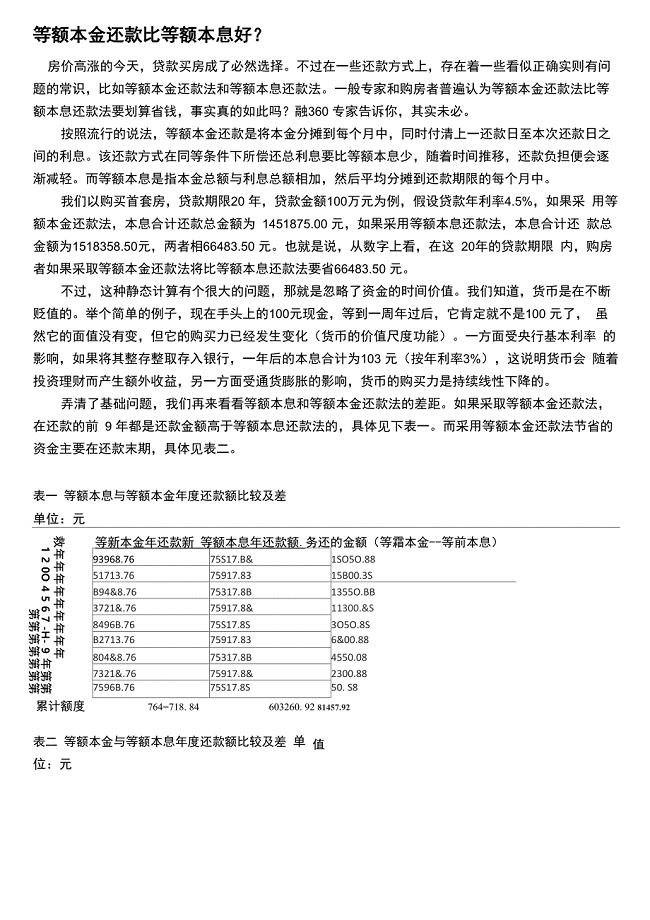
等额本金还款比等额本息好

精品资料(2021-2022年收藏)热回收风冷冷热水设计讲解
食品安全风险监测工作制
2023年四川省雅安市汉源县九襄镇民主社区工作人员考试模拟试题及答案
股票配资合同样本
2023年咨询工程师《决策分析与评价》考试全真模拟易错、难点汇编第五期(含答案)试卷号:12

建设年产法兰毛坯2000吨技术改造项目创业计划书写作模板
高等教育自学考试全国统一命题考试

大金CUW水机专题方案模板
初中英语要掌握的词汇
发芽的大蒜能吃吗?发芽的大蒜可以吃吗
必备工作方案集锦8篇
八年级英语教学案
第一学期幼儿教学工作总结范例
机械制图毕业考试题.2doc
2018-2019学年高中语文 专题八 第25课 上枢密韩太尉书(自读课)学案 苏教版选修《唐宋八大家散文选读》
 扬州民间剪纸
扬州民间剪纸
2023-07-02 2页
施工员实训报告
2022-10-26 11页
汽车电子稳定系统ESP分析分析解析
2022-08-12 19页
等额本金还款比等额本息好
2022-11-24 5页
等额本金还款比等额本息好
2022-11-12 5页
核桃树的嫁接与管理
2024-02-10 14页
MySQL 自动备份与数据库被破坏后的恢复方法
2024-02-27 10页
蒸压加气混凝土砌块墙体防治裂缝与渗漏施工技术
2023-05-06 7页
资产评估的基本方法
2024-03-06 17页
消防施工(PE管和球墨铸铁管)安装技术交底
2022-11-29 5页