
搬运机械手及其控制系统设计论文说明书
40页
1、目 录目 录摘 要IABSTRACT(英文摘要)目 录IV第一章 引 言11.1 课题的背景和意义11.2 课题国内外发展现状2第二章 总体方案确定42.1 总体方案论证42.1.1 机械手手臂结构方案设计42.1.2 机械手驱动方案设计42.1.3 机械手控制方案设计52.1.4 机械手主要参数52.1.5 机械手的技术参数列表6第三章 机械手总体结构设计73.1 动作工况与分析73.2 机械手各部分结构设计83.2.1 机械手底座的设计83.2.2 立柱结构的设计83.2.3 轴承的选择93.2.4 上轴承座的选择103.2.5 下轴承座的选择113.2.6 大臂的结构设计123.2.7 小臂的结构设计123.2.8 气爪的结构设计123.2.9 手部夹紧气缸设计计算143.2.10 升降气缸设计计算183.2.11 伸缩气缸设计计算223.2.12 回转气缸设计计算25第四章 气动部分设计28第五章 PLC控制部分设计305.1电磁铁动作顺序305.2 I/O分配305.3 PLC控制梯形图315.4 PLC控制程序指令32结论37参考文献38致谢39摘 要近20年来,气动技术的
2、应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求。本课题设计源于生产线中的搬运站,传动方式采用气压传动,即用各种气缸来控制机械手的动作,控制部分结合可编程控制技术编写程序进行控制来实现两站之间的搬运。机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。本课题中设计的搬运机械手主要有旋转、伸缩、升降、夹紧四个自由度组成。课题从机械部分、气动部分和控制三部分对气动机械手进行设计,要求机械手实现上下站之间的搬运功能。机械部分重点是总体结构的设计、各个气缸的选择和安装设计、各零部件的结构设计等,气动部分主要是给出了搬运机械手的气动原理图,而控
3、制部分则主要是程序的设计和调试,论文采用西门子(S7-200)指令编程,给出了相应的梯形图、语句表和简单的流程图。由于气动机械手有结构简单、易实现无级调速、易实现过载保护、易实现复杂的动作等诸多独特的优点,气动机械手正在向重复高精度,模块化,无给油化,机电气一体化方向发展。可以预见,在不久的将来,气动机械手将越来越广泛地进人工业、军事、航空、医疗、生活等领域。关键词:可编程控制器,柔性自动生产线,自由度,梯形图 AbstractOver the past 20 years, the field of pneumatic technology expand rapidly,which is widely used in a diverse array of automated production line especially.The combine of electrical programmable technology and pneumatic control technology makes the whole system a higher degree of automa
4、tion, more flexible control and more reliable performance;The rapid develop of pneumatic manipulator and flexible automated production lines requier much more to the development of pneumatic technology . This topic originated from the handling station of the production line;The drive is used pressure transmission, which uses a variety of cylinder to control the robots movement and the control parts combining the programmable control technology make a programme to achieve the control of the trans
《搬运机械手及其控制系统设计论文说明书》由会员m****分享,可在线阅读,更多相关《搬运机械手及其控制系统设计论文说明书》请在金锄头文库上搜索。
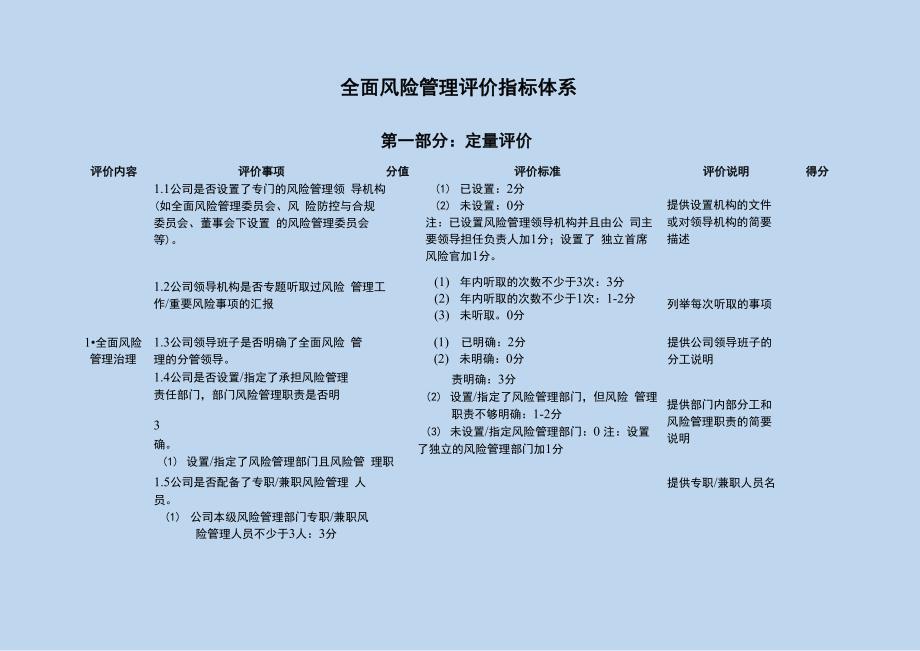
全面风险管理评价指标体系
区司法局消防安全工作总结
常州市2011年初三教学情况调研测试6月(华罗庚实验学校完稿)
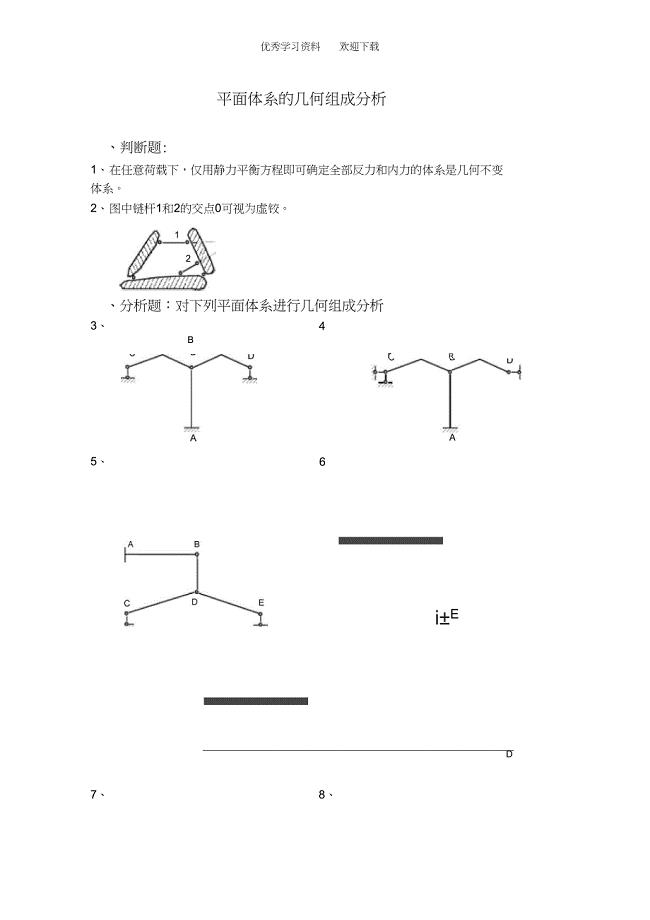
《结构力学习题集》平面体系的几何组成分析附答案
绿色食品行业和农业产业化相关分析报告

2023年老父亲祝词(精选5篇)
房地产公司全套培训管理制度

2022年房管处职工队伍建设半年工作总结
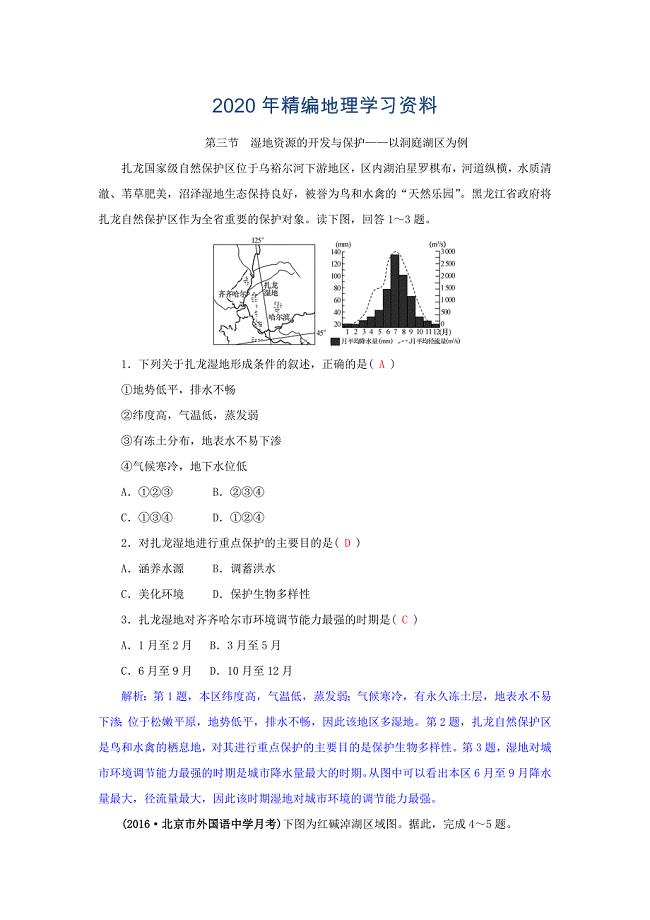
2020年高三地理一轮复习同步训练:第十一章 区域可持续发展 第三节 湿地资源的开发与保护——以洞庭湖区为例 Word版含答案
医院院长办公会制度
学校后勤管理的工作计划标准范本(三篇).doc
直流牵引网最大压降的分析与计算

《环境对生物的影响》教学设计

新《施工方案》杭州奥体博览中心主体..项目招标公告
助学金申请书大学生15篇
2023年摄影主管岗位职责
弥漫性轴索损伤
中医药临床科研设计的基本要求和方法
卫生院传染病防治项目实施方案
土建资料流程
 (精选)村妇联主任个人工作总结报告3篇
(精选)村妇联主任个人工作总结报告3篇
2023-10-17 7页
最新机关事业单位工人汽车驾驶员高级、技师国家题库练习题精选455题(附答案)
2024-01-20 50页
投资分析平时作业1-4答案.doc
2023-03-26 21页
幼儿园中班语文试卷.doc
2024-01-06 3页
2018最新电大商法复习资料
2023-10-24 15页
2021年中考数学专题练习三 分式
2023-06-28 4页
药品管理法培训试题及答案2020.docx
2022-12-05 5页
口语教学片段设计说课稿(日常)
2023-02-18 1页
电气安装技术课程自我诊改报告.docx
2022-09-02 2页
江苏省苏州市2018_2019学年七年级英语上学期期中调研测试卷.docx
2023-02-16 10页