
P、PD和PID控制器性能比较
29页
1、学 号: 自动控制原理题 目P、PD和PID控制器性能比较学 院自动化学院专 业电气工程及其自动化班 级姓 名指导教师2013年1月20日摘要比例(P)控制规律是基本控制规律中最基本的、应用最普遍的一种,其最大优点就是控制及时、迅速。只要有偏差产生,控制器立即产生控制作用。但是,不能最终消除余差的缺点限制了它的单独使用。克服余差的办法是在比例控制的基础上加上积分控制作用。比例-微分(PD)控制器比单纯的比例控制作用更快,尤其是对容量滞后大的对象,可以减小动偏差的幅度,节省控制时间,显著改善控制质量。最为理想的控制当属比例-积分-微分(PID)控制规律,它集三者之长:既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分控制功能。本次课设对P、PD和PID控制器性能进行详细的比较,着重分析各控制器下、三种典型输入下的稳态误差,还对三种典型信号作为扰动输入的系统性能进行了分析。最后使用Matlab软件对以上分析结果进行更加直观的论证。关键字:控制器 稳态误差 扰动 跟踪性能目录1 题目与要求12 由参考输入决定的系统性能分析12.1 由R(s)输入决定的系统传递函数22.1.1 开环
2、传递函数22.1.2 闭环传递函数22.1.3 系统误差传递函数22.2 不同控制器下系统的系统性能22.2.1误差常数22.2.2 P控制器下的系统分析52.2.3 PD控制器下的系统分析62.2.4 PID控制器下的系统分析73 由扰动输入决定的系统性能分析73.1 不同的控制类型对应的系统类型83.2 不同控制类型下的系统稳态误差83.2.1 P控制下的系统分析83.2.2 PD控制下的系统分析93.2.3 PID控制下的系统分析94 该系统的跟踪性能和扰动性能分析94.1 系统的跟踪性能分析94.2 系统扰动性能分析105 运用Matlab进行仿真115.1 由参考输入决定的系统仿真115.1.1 阶跃信号输入时的各控制系统输出响应115.1.2 斜坡信号输入时的各控制系统输出响应135.1.3 加速度信号输入时的各控制系统输出响应165.2 由扰动输入决定的系统仿真195.2.1 阶跃扰动输入时的各控制系统输出响应195.2.2 斜坡扰动输入时的各控制系统输出响应215.2.1 阶跃扰动输入时的各控制系统输出响应236 心得体会24参考文献25P、PD和PID控制器性能比较1
3、 题目与要求RYe+-+W-一二阶系统结构如图1所示,其中系统对象模型为 , 控制器传递函数为,令,。图1 一二阶系统结构图要求完成的主要任务:(1) 分析系统分别在P、PD、PID控制器作用下的,由参考输入决定的系统类型及误差常数;(2) 根据(1)中的条件求系统分别在P、PD、PID控制器作用下的、由扰动w(t)决定的系统类型与误差常数; (3) 分析该系统的跟踪性能和扰动性能;(4) 在Matlab中画出(1)和(2)中的系统响应,并以此证明(3)结论;(5)对上述任务写出完整的课程设计说明书,说明书中必须写清楚计算分析的过程,其中应包括Matlab源程序或Simulink仿真模型,并注释。2 由参考输入决定的系统性能分析分析由参考输入决定的系统性能,则要忽略扰动输入,得到如图2的系统结构图。图2 由参考输入决定的系统结构图2.1 由R(s)输入决定的系统传递函数2.1.1 开环传递函数系统类型由系统开环传递函数决定。根据结构图,很容易得到系统的开环穿的函数,系统的开环传递函数为:2.1.2 闭环传递函数系统的输出相应是由闭环传递函数和输入决定的。系统的闭环传递函数(s)为:2.
《P、PD和PID控制器性能比较》由会员工****分享,可在线阅读,更多相关《P、PD和PID控制器性能比较》请在金锄头文库上搜索。
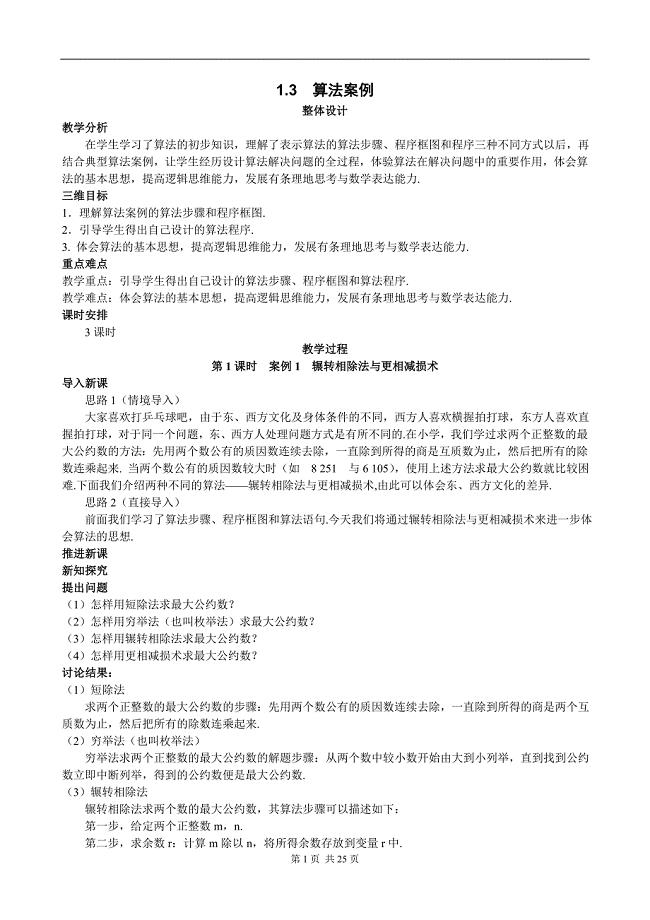
13算法案例教案
2022年在全县工商部门治理商业贿赂工作会议上的讲话

MATLAB中通用句柄属性
201第一节大洲和大洋(说课稿)

作为幼儿教育第一线的教师
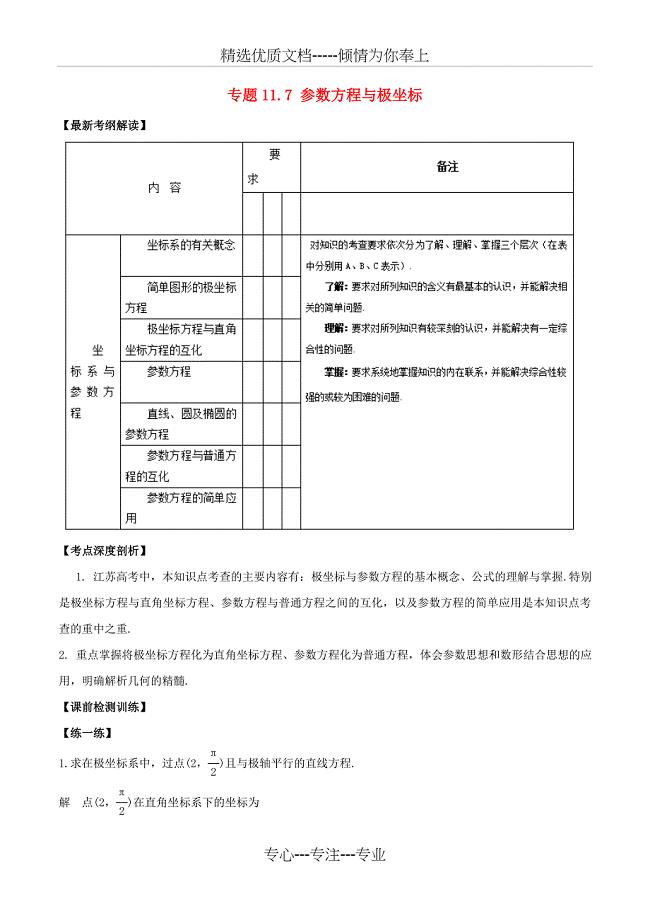
江苏版高考数学一轮复习专题1.7参数方程与极坐标讲理
办公家具行业发展趋势报告
销售部员工月度工作总结及计划
列表-世界地质公园
武汉医药技术服务项目可行性研究报告参考模板
幼儿园教师培训工作计划范文(7篇).doc
正比例函数练习题及答案.
劳动经济学试卷及答案
矿区重大灾害应急救援指挥系统说明书
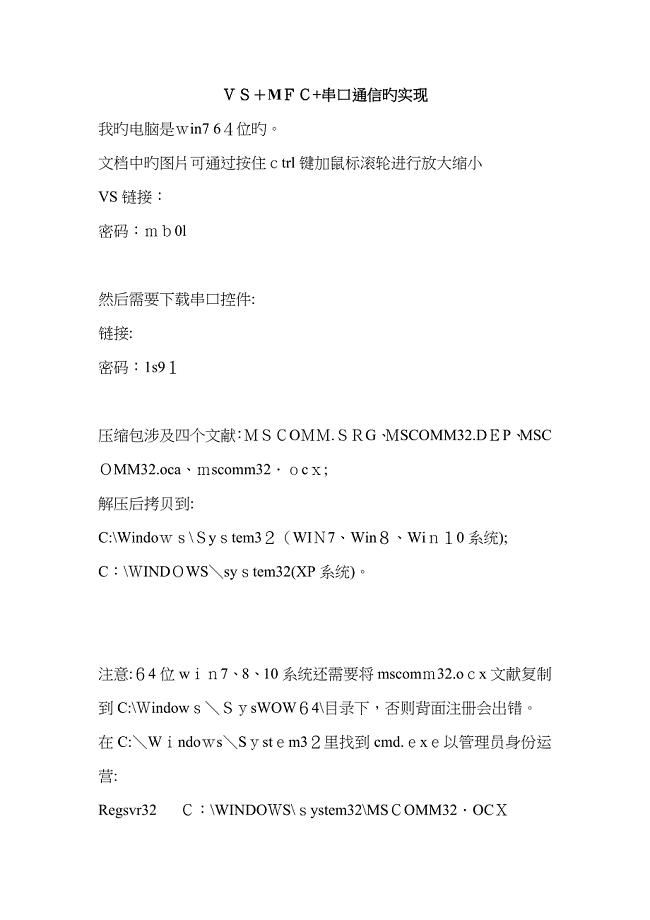
VS+MFC+串口通信的实现
2023年关于老师师德演讲3篇(教师演讲师德先进演讲题目)
推荐工作方案模板汇编十篇
辅导教师述职报告四篇
2022培训公司年度工作小结
2023年浙江省台州市黄岩区新前街道西岙村社区工作人员考试模拟题含答案
 活动五铅笔淡彩教学设计
活动五铅笔淡彩教学设计
2022-09-13 3页
高级英语短语翻译
2023-06-25 7页
斜A子母型相似在填空中的应用
2022-12-23 2页
江苏省泰兴市济川中学初中语文 散不去的香味学生作文素材
2023-06-26 2页
怎样成为一名好教师
2023-06-05 1页
浙江省宁波市20172018学年高一语文下学期第二次阶段测试试题无答案
2023-05-01 11页
201第一节大洲和大洋(说课稿)
2023-11-19 4页
小学体育节开幕式主持
2023-10-22 23页
江苏省扬州市江都区2012-2013学年七年级数学下学期期末考试试题 苏科版
2023-11-14 7页
企业固定资产管理系统毕业论文
2023-11-24 33页