
用串行口控制步进电机两维运动系统
3页
1、用串行口控制步进电机两维运动系统2009-5-13 10:00:00王继业供稿摘要:本文介绍了一种通过微机的串行口控制两维坐标定位系统的新方法。该方法不需要MCU,可以方便的通过改变串口的波特率来改变步进电机的运行速度,可以通过RS232串口中控制Modem状态的输入、输出信号来控制运动的方向和读入不同的位置信息。该方法使用逻辑电路实现控制功能,比用MCU的方法不仅简单,省却了编程的麻烦,而且提高了可靠性。关键词:串行口;步进电机;运动控制Abstract:anewmethodaboutthetwo-dimensioncoordinatecontralsystembytheserialportofthepersonal-computerisintroduced.thismethodisconvenientforchangingthemotionspeedofthestepmotorthroughchaningthebaudrateoftheserialport,andcontralingthemotiondirectionandgettingthepositioninformation
2、ofthemotorbycontralingtheinputoroutputsignaloftheModemstateintheRS232serialport.Thisnewmethodusinglogiccirculttorealisingthecontralingfunctionismoresimple,sothereisnoneedofprogramming,andcanimprovethereliability.Keywords:serialport、stepmoter、motioncontrol1.引言步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。步进电机在数控机床、医疗器械、仪器仪表等自动或半自动设备中得
3、到了广泛应用。用计算机控制步进电机的通常作法是采用步进控制卡,这种方法不仅成本较高,而且不便于操作。在计算机扩展槽上安装控制卡,必需打开机箱才能操作,而且在小型平板电脑和嵌入式电脑中根本没有安装控制卡的空间和扩展槽。进年来出现了将计算机串行口二次开发,用于控制步进电机的技术,代替控制卡的作用,具有成本低、操作简单、兼容性好等优点。本文介绍了一种通过微机的串行口控制两维坐标定位系统的新方法。串行口是微机系统的标准配置,在仪器仪表控制系统中得到广泛的应用。计算机串行接口采用RS232标准1:规定逻辑1的电平为-3-15V,逻辑0的电平为+3+15V,常用的信号有8个(接口为DB9M和DB25M插座时,引脚号如表1所示),其中RXD、TXD为收、发数据,可与RS232串行口设备直接进行通讯,RTS、DTR、CD、DSR、CTS、BELL为控制与检测MODEM的信号,在通讯过程中起联络与控制作用。数据格式有5、6、7、8位几种,1位起始位(逻辑0),1、1.5、或2位停止位(逻辑1),可以选择奇校验、偶校验和无校验,常用波特率为2400、4800、7200、9600bps等。表1标准9针和25
4、针串口的管脚定义用串行口控制步进电机驱动的运动系统的一般方法是通过单片机或其它嵌入式控制系统,由计算机向单片机系统发送控制信息,单片机系统再直接控制运动系统,从而计算机可以间接的控制系统的行为。这种方法有一些缺点。比如控制缺少灵活性,往往只能按照事先定好的模式运动,不能通过控制软件任意改变。单片机要同时接受计算机命令和发送状态给计算机,又要控制运动系统,多任务并行,给程序编制带来一定麻烦。单片机程序容易跑飞,给系统可靠性带来很大威胁,甚至有时需要人工复位操作。为了克服这些缺点,在实际应用中,我们设计了一个串行口直接控制运动系统的方法。该方法不需要MCU,可以方便的通过改变串口的波特率来改变步进电机的运行速度,可以通过RS232串口中控制Modem状态的输入、输出信号来控制运动的方向和读入不同的位置信息。由于是直接控制,没有中间的处理器系统,克服了上面的缺点,降低了成本。下面介绍这种控制系统实现的方法。2.二维运动步进电机驱动的控制方法步进电机驱动的二维运动定位系统中,每一个维度都是由步进电机驱动丝杠转动,丝杠再把运动转化为直线运动。如图1所示。对该系统的控制,除了要发出步进电机的方向控
《用串行口控制步进电机两维运动系统》由会员hs****ma分享,可在线阅读,更多相关《用串行口控制步进电机两维运动系统》请在金锄头文库上搜索。
精品专题资料(2022-2023年收藏)广西壮族自治区事业单位招聘考试《公共基础知识》真题及答案精选一资料
《二氧化碳地性质》导学案
美丽的丹顶鹤练习题
《建设工程工程量清单计价规范》问题解答

有关母爱的小学生作文三篇
中学后勤工作计划标准范本(三篇).doc
STS静态转换开关工作原理
固体废物课程设计
美发与形象设计专业教学计划
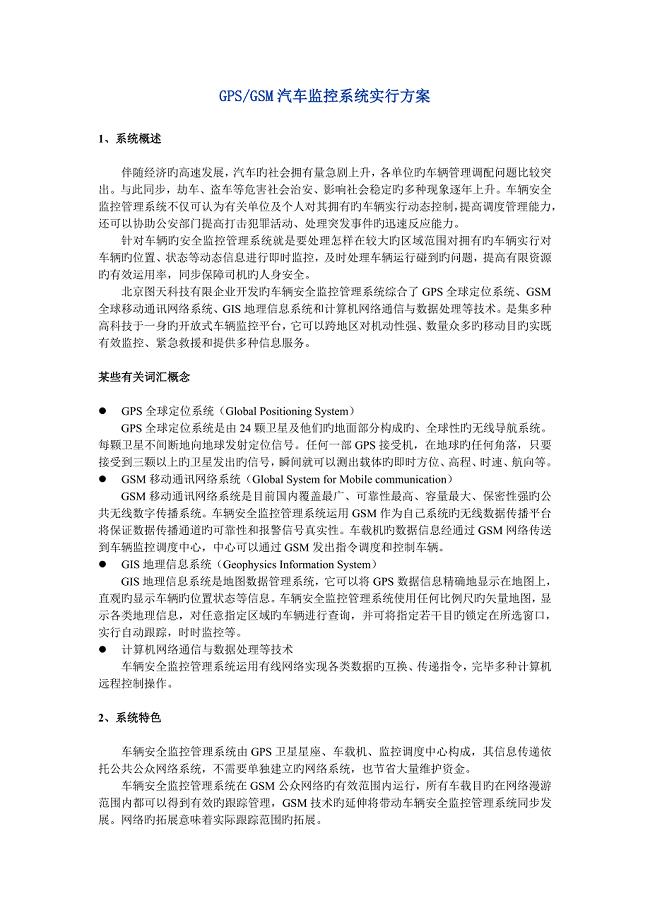
GPSGSM汽车监控系统实施方案资料

某公司人力资源规划管理制度
承包经营幼儿园协议
法律六进工作方案
(江苏专用)2021年高考生物重难点突破强化练第70练分析生物技术的安全性和伦理问题掌握生态工程原理新人教版
美食节开幕式主持词结尾
萧县2011年农村义务教育薄弱学校改造工程项目可行性研究报告
有关六年级数学教学计划集锦十篇.doc
设备租赁协议书
最新小学班主任工作总结精选范文
客服个人工作总结5篇
 设备设施检维修管理制度
设备设施检维修管理制度
2023-08-15 5页
火灾事故应急预案控制程序
2023-09-11 6页
手卫生相关知识
2022-09-16 10页
高炉车间煤气工布袋除尘岗位职责
2023-03-10 9页
电力排管专项施工方案
2023-07-20 36页
海尔都有脑电波电视啦别把科幻不当干粮
2023-10-28 5页
从车身到电池激光器提升汽车效率
2023-11-03 2页
电控汽油发动机空气供给系统故障的诊断2
2023-12-25 5页
砌体结构专项施工方案(中建2017)
2023-04-30 22页
普通建筑用石料凝灰岩矿开采项目评价方法
2023-09-07 2页