
机械专业外文文献翻译-外文翻译--位移传感器的一种绝对的校准方法
24页
1、 外文资料名称: An absolute calibration method for displacement sensors (用外文写)外文资料出处: Measurement 附 件: 1.外文资料翻译译文 2.外文原文 指导教师评语: 签名: 年 月 日位移传感器的一种绝对的校准方法张诗洲 清野聪卞秋燕 译摘要:在现代研究中,一种新的位移传感器的绝对校准方法被提出并且校准系统被开发。这种新方法不但能确定线性错误而且能确定在波长上的平均敏感性(校准线的倾斜)。新测量系统由一个小型的激光干涉仪在以前开发的校准系统里。激光干涉计只通过半波长的整数倍的激光光源来确定必要的位移量。通过使用这个知道位移量,一台位移传感器的平均敏感性和线性误差就可以被绝对确定下来。被提议的方法的准确性只依赖被校验的位移传感器的自身的稳定性以及激光光源的波长。一种电容型非接触位移传感器被校验成功,这种传感器有别于通过信噪比决定的有稳定极限的位移传感器。关键词:绝对校验;位移传感器;灵敏度;非线性。1序言位移传感器早就被用于极端精密的几何量的测量,例如确定位置,震动以及轴和表面的外形测量。 使用特殊的检测技术,
2、位移传感器能达到极其高的分辨率. 但是, 精确的位移传感器被固有的系统误差影响, 例如传感器出产的线性错误(线与校准线的偏差)。 尤其,线性错误的影响比分辨率水平的影响要大得多。例如, 尽管一些位移传感器有纳米,最大量程却只有100微米, 准确地说, 主要由于线性误差,只能达到量程的0.2%. 另外,特有的线性误差是不稳定,极端精密的测量要求位移传感器频繁校准,使它适应被使用的环境(在原处状态)。 不过,一些问题与这样的校准有关。这些问题的困难是涉及到获得比附属纳米分辨率更好的正确参考,并且涉及到怎样执行那些测量系统中需要位移传感器的频繁校正。另外,那些位移传感器需要在原处校准。现在作者提出一种对一些几何传感器来说在原处自校准线性错误的方法,例如一台位移传感器以及一台角度传感器. 这种方法 也已经被用于校验一台扫描白光干涉计显微镜.被提出的方法是基于获得校准曲线导出功能,校准曲线只是稍微的受那些精确入量影响.这些原理被准确地分析阐明。电子计算机模拟用来确定线性误差,百分之多点的量程,可以使用刚刚提出的方法正确校核。 提出的方法的准确只依赖被校验的传感器的稳定性和分辨率。 不过,被提出的
3、方法还基于传感器的平均的敏感性被事先给出; 因此,只有线性误差(与线的校准线的偏差)可以被确定。在现在的研究中,一种对位移传感器的新的绝对校准方法被提出,并且校准系统被开发。 这种新方法不仅可以用于确定线性误差,而且可以在波长的基础上确定平均敏感性(校准线的倾斜度)。 新测量系统结合一台小型激光干涉计和以前开发的原处校准系统. 激光干涉计只用激光光源的半波长的整数倍来确定必要的位移量。通过使用这个知道位移量,一台位移传感器的平均敏感性和线性误差就可以被绝对确定下来。目前的报道中, 绝对校准的原理使位移传感器和校准系统被提出。 另外,被提议的方法的可行性被实验上证明。 一种电容型非接触位移传感器被校验成功,这种传感器有别于通过信噪比决定的有稳定极限的位移传感器。2绝对校正原理通常,校准可能被分成两个部分:平均敏感性为校准和线性误差校准 参阅图1 ( a ) . 在前边部分里,平均敏感性,与确定的传感器校准线的倾斜度有关。 另外,线性误差,和线与确定的校准线的偏差有关。21 原理绝对校准的原理与位移传感器在原处校准的概念相同,在原处校准的位移传感器,不进行收敛计算,而是反函数被计算。 图1
4、(a)显示的f(x)是位移传感器的输出曲线,那一般被表示为有斜度S和偏差O的直线的总和,直线的功能为重力加速度g(x)。 f(x)的功能表示如下:z=f(x)=S0x+g(x) (1) 这里,S和g(x)分别描述平均敏感性和线性误差, 让位移传感器在xi位子取样输出mi并且在xi+x处(x是位移量)输出mi+。如果反函数f(x)如图1(b)显示:zi = mi,f-1(zi)=zi/S0-h(zi) (i=1,2,n) (2)这里n是取样的数目h(z)是g(x)的反函数。h(z)的导数在离散采样点可以表示为:h(zi)=1/s0-x/mi (mi=mi+-mi) (3) 这里,必要位移量x可以使用激光光源的半波长的整数倍数来确定。S0可以通过下式计算出:S0=mi/x/n (4)并且h(z)可以通过对h(zi)积分求出。22 模拟结果图2 显示出了模拟结果。 校准位移的传感器的测量范围是100微米。位移量是4微米。 敏感性的标准值是0.2vum-1。线性误差是一条以零线对称的正弦曲线,振幅为200nm。 随机误差有=2的偏差,这主要包含在采样正弦曲线里. 通常抽样间隔是0.5um,并且
《机械专业外文文献翻译-外文翻译--位移传感器的一种绝对的校准方法》由会员cn****1分享,可在线阅读,更多相关《机械专业外文文献翻译-外文翻译--位移传感器的一种绝对的校准方法》请在金锄头文库上搜索。
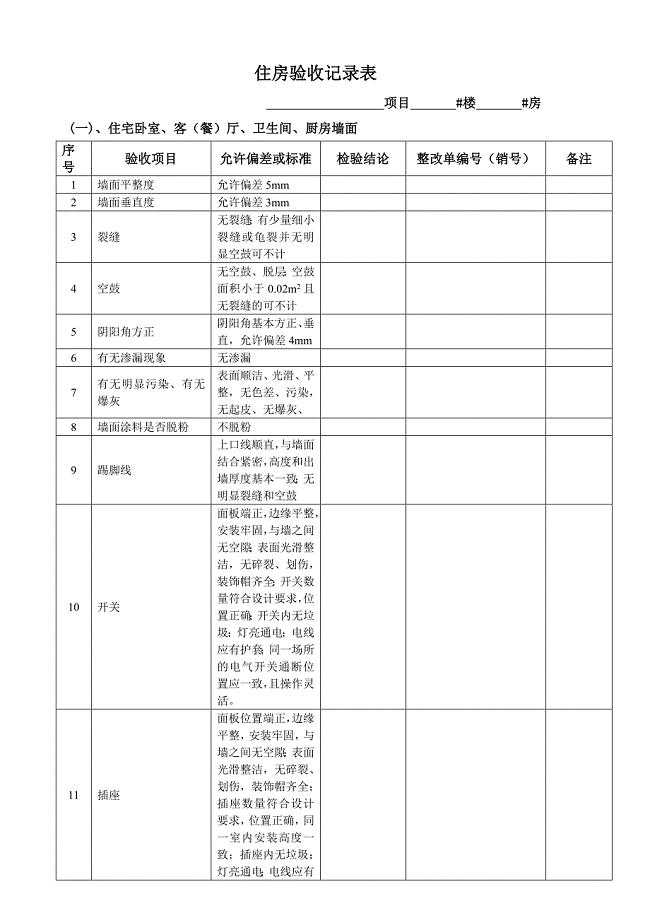
住房验收记录表
廉租房协议书官方
幼儿园老师英语课教案
2018年健身活动总结4篇
小学数学单位换算大全
2023年圣诞节活动总结报告模板(2篇).doc

旅行鸽的命运现代文阅读答案
简洁的小学生自我介绍范文汇编五篇
装饰装修工程质量验收用表
2023年四川省成都市大邑县新场镇龙桥社区工作人员考试模拟题及答案
2023年电大形成性考核册c第四次作业及答案
2018初级护师考试《基础知识》真题及答案(文字版)
航材院技术改造部设备技术专责职务说明书
关于教师的100句话【最新】
【幼儿园食材发霉孀】幼儿园2023--2023年秋学期保教工作方案
房地长开发项目全程策划方案设计毕业论文
电大本科教育学形成性考核册作业答案(最新)
电气化铁路冬季施工方案
某中学教育教学规范要求(推荐阅读)(DOC 17页)
兴业银行客户经理管理办法
 级汉语言文学(师范)本科专业培养方案
级汉语言文学(师范)本科专业培养方案
2024-02-26 18页
白桦林明天北地块建设项目环境影响报告书
2023-06-06 125页
读《安妮日记》有感精选范文5篇
2022-07-19 8页
清明节扫墓六年级的作文600字五篇
2023-06-14 8页
运工作方案15篇
2023-09-14 95页
2022年关于促销策划方案锦集8篇
2024-02-08 30页
旅行鸽的命运现代文阅读答案
2023-09-17 6页
圣诞节店铺活动策划方案汇编11篇
2023-10-04 34页
2023年酒店员工辞职报告汇编15篇【精品模板】
2023-12-02 20页
2022年幼儿园个人校本研修心得体会范文
2024-01-06 13页