
机械专业外文文献翻译-外文翻译--机构和机器原理
13页
1、英文原文MECHANISMS AND MACHINE THEORY1.Introduction to Mechanism:The function of a mechanism is to transmit or transform motion from one rigid body to another as part of the action of a machine. There are three types of common mechanical devices that can be used as basic elements of a mechanism.1、Gear system, in which toothed members in contact transmit motion between rotating shafts. 2、Cam system, where a uniform motion of an input member is converted into a nonuniform motion of the output member.
2、3、Plane and spatial linkages are also useful in creating mechanical motions for a point or rigid body. A kinematic chain is a system of links, that is, rigid bodies , which are either jointed together or are in contact with one another in a manner that permits them to move relative to one another. If one of the links is fixed and the movement of any other link to a new position will cause each of the other links to move to definite predictable position, the system is a constrained kinematic chai
3、n. If one of the links is held fixed and the movement of any other link to a new position will not cause each of the other links to move to a definite predictable position then the system is an unconstrained kinematic chain,A mechanism or linkage is a constrained kinematic chain, and is a mechanical device that has the purpose of transferring motion and/or force from a source to an output. A linkage consists of links (or bars), generally considered rigid, which are connected by joints, such as p
4、in Cor revolute) or prismatic joints, to form open or closed chains (or loops). Such kinematic chains, with at least one link fixed, become mechanisms if at least two other links remain mobility, or structures if no mobility remains. In other words, a mechanism permits relative motion between its rigid links; a structure does not. Since linkages make simple mechanisms and can be designed to perform complex tasks, such as nonlinear motion and force transmission they will receive much attention in
《机械专业外文文献翻译-外文翻译--机构和机器原理》由会员人***分享,可在线阅读,更多相关《机械专业外文文献翻译-外文翻译--机构和机器原理》请在金锄头文库上搜索。
2022年医院财务年终的工作总结
1财务报表分析复习思考题
多功能数字钟电路设计课程设计
2021年度水利安全知识竞赛试题及答案(三)
小学实习自我鉴定 15篇
2023年第一次购物作文
风景名胜区基础知识
数字信号复习题2
2023年河南省商丘市睢县白庙乡东朱楼村社区工作人员考试模拟试题及答案
互联网环境下企业会计毕业分析
2022年高一下学期期末考试英语试题 含解析(I)

医学影像科报告审核制度与流程
2022年《新语文读本》读后感
项目人力资源管理论文
九年级语文上册第4课画山绣水精品教学案苏教版
关于同学道歉信集锦六篇
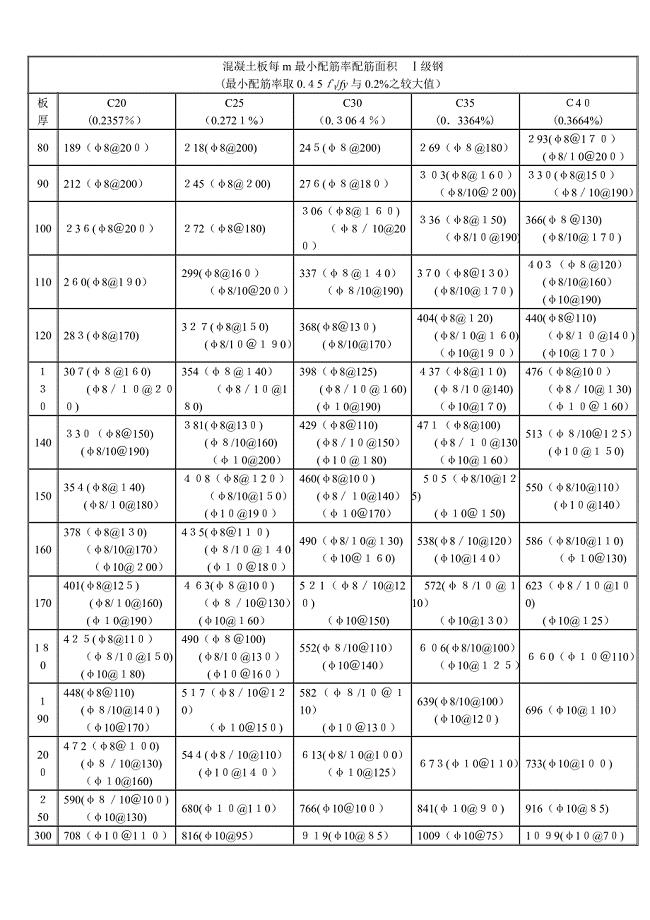
混凝土板每m最小配筋率配筋面积表
2003年优势农产品产地环境质量监测工作方案
教育实习的自我总结模板(3篇).doc
2023儿科护士工作总结模板(3篇).doc
 2023饮料购销合同书
2023饮料购销合同书
2023-03-24 37页
电算实习报告四篇
2023-06-20 10页
读怀念母亲有感500字五篇
2023-04-12 7页
多功能数字钟电路设计课程设计
2022-10-08 19页
(实用)主任述职四篇
2023-10-25 13页
小学实习自我鉴定 15篇
2024-01-27 35页
2023关于小学班主任实习报告三篇
2023-12-27 13页
人教版小学语文一年级上册《雪地里的小画家》教案及反思
2023-10-12 12页
化肥厂低压煤气系统搬迁工程施工组织设计
2022-12-06 70页
农行员工资格考试习题集及答案(柜员)
2023-10-02 93页