
机械原理实验指导书
16页
1、 机械原理与机械零件实验报告(实验指导书)方岳、 王清编班级 学号 湖南理工学院机电系2007-9-24机械原理实验一:机构运动简图测绘一、 实验目的:1 学会撇开实际机器的构造,而仅从运动学的观点来测绘其机构的运动简图。2 验证和巩固自由的计算及运动链的运动是否确定的判别方法。二、 设备和工具 1 机械模型2 量具:钢板尺、卡尺、内外卡钳3 自备:圆规、三角尺、橡皮、铅笔、草稿纸三、 测绘原理和方法:1 测绘原理:由于机构的运动仅与机构中的所有的构件数目和构件所组成的运动副的数目、种类、相对位置有关,因此,在机构运动简图中可以撇开构件的复杂外形和运动副的具体结构,而用简单的线条和规定的符号表示相应的构件和构件与构件连接的运动副,并按一定的比例表示机构各构件的尺寸,运动副的相对位置,以此来实现运动构件的运动特性,这样画出来的图即为机构运动简图。常用的运动副的代表符号见附表1-1、1-2,必须注意运动副的表示方法。2 测绘方法:1) 测绘时将被测绘的模型缓缓转动。从原动件开始仔细观察机构的运动分清各个运动单元,从而确定组成机构件数目。2) 根据相联的两构件间的接触情况及相对运动和性质,确
2、定各个运动副的种类。3) 在草稿纸上徒手按规定的符号及构件相联的次序,从原动开始,逐步画出机构运动示意图。用数字1、2、3分别表出各个构件,用A,B,C分别标注各运动副。4) 仔细测量与机构有关的尺寸,即转动副间的中心和移动副导路的位置尺寸或角度等等。任意假定原动构件的位置,并按一直的比例尺将机构运动示意图画成正式的机构运动间图。四、实验步骤:1 了解被测机器的名称、用途。2 仔细观察机构的运动,弄清构件数目,运动副的数目的类型。3 缓慢转动被测绘的机构(机器),从原运件开始,根据其运动的传递路线,(即原运件从动件),仔细观察互相连接的两零件间是否有相对运动,从而弄清组成机构的构件数目。分析各个构件间相对运动的性质,确定运动副的类型,运动副的数目。4 合理选择机构运动的投影面。一个投影面难以表达清楚时,允许选择两个或两个以上的投影面,力求清楚简单正确地把机构表示出来。5 画出机械运动示意图从动件开始,目测实物尺寸或用测量工具量出尺寸,用简单的线条表示出来相应的构件,用规定的符号构件连接起来,然后中将活动件用1、2、3分别标注,固定构件用固定符号表示,运动副依次用A、B、C分别标注。6
3、据机构运动示意图按比例u定出运动副的相对位置,用构件和运动副的规定符号绘成机构运动简图。 U=实际长度(m) / 图示长度(mm)7计算机构自由度平面机构自由度计算公式:F=3n-2P1-PHn-表示机构活动件数P1-表示运动副低副数PH-表示运动副高副数8检查计算结果是否正确。例如根据所得结果,F=1,则该机器只有一个原动作,这时机构件运动均是确定的,计算结果与实际机构完全相符,否则运动是不确定的。9思考题:1) 一个正确的机构运动简单图应能说明哪些问题?2) 机构自由度的计算对测绘机构运动简图有何帮机构运动简图测绘实验报告姓名: 实验日期: 成绩: 审阅人 : 审阅日期: 1简图和计算机构名称机 构 运 动 简 图长度比例尺活动构件数低副数高副数机构自由度机构名称机 构 运 动 简 图长度比例尺活动构件数低副数高副数 机构自由度2、 思考题1) 一个正确的机构运动简单图应能说明哪些问题?2) 机构自由度的计算对测绘机构运动简图有何帮动运副名称运 动 副 符 号两运动构件的运动副两构件之一为固定时运动副平面运动副转动副移动副平面高副空间运动副螺旋副球面副及球销副在支架上的电机齿轮齿传
4、动带传动圆柱蜗杆蜗轮传动链传动圆柱蜗杆蜗轮传动外啮合圆柱齿轮传动凸轮传动内啮全圆柱齿轮传动轮机构机械原理实验三:渐开线齿廓范成原理一、 实验目的:1、 用范成法制造渐开线齿轮的基本原理,观察齿廓形成的过程。2、 解变位齿轮的加工过程,分析比较标准齿轮正、负变位齿轮的异同。3、 了解当齿轮发生根切时,如何采用齿轮避免根切。二、 设备与工具:1. 齿轮范成仪:2. 学生自备:计算器、圆规、铅笔、三角板、300*300图纸1张等3. 齿条刀具的基本参数m =20 a=20o ha=1 c=0.25三、 实验原理和方法范成法是利用一对齿轮或齿条互相啮合时其共轭齿廓互为包络线的原理来加工齿轮的。加工时其中一轮为刀具,另一轮为毛坯的刀具之间仍然保持固定的角速度比传动,它们的对滚运动与一对互相啮合的齿轮的运动完全一致,同时刀具还沿轮坯的轴向作切削运动。这样制得的齿轮的齿廓就是刀具的刀刃在各个位置的包络线,若用渐开线作为刀具的齿廓。则包络线亦必为渐开线。由于在实际加工时看不到刀刃的各个位置所形成的包络线的过程,帮通过齿轮范成仪来实现轮坯与刀具之间的传动过程,并用铅笔将刀具各个位置所形成的包络迹描在毛坯
《机械原理实验指导书》由会员cl****1分享,可在线阅读,更多相关《机械原理实验指导书》请在金锄头文库上搜索。
人教版新教材二年级上册语文教学计划(2篇).doc
教研会心得体会
比与比例的知识点与练习题
县市场监管“三抓三促”行动情况汇报
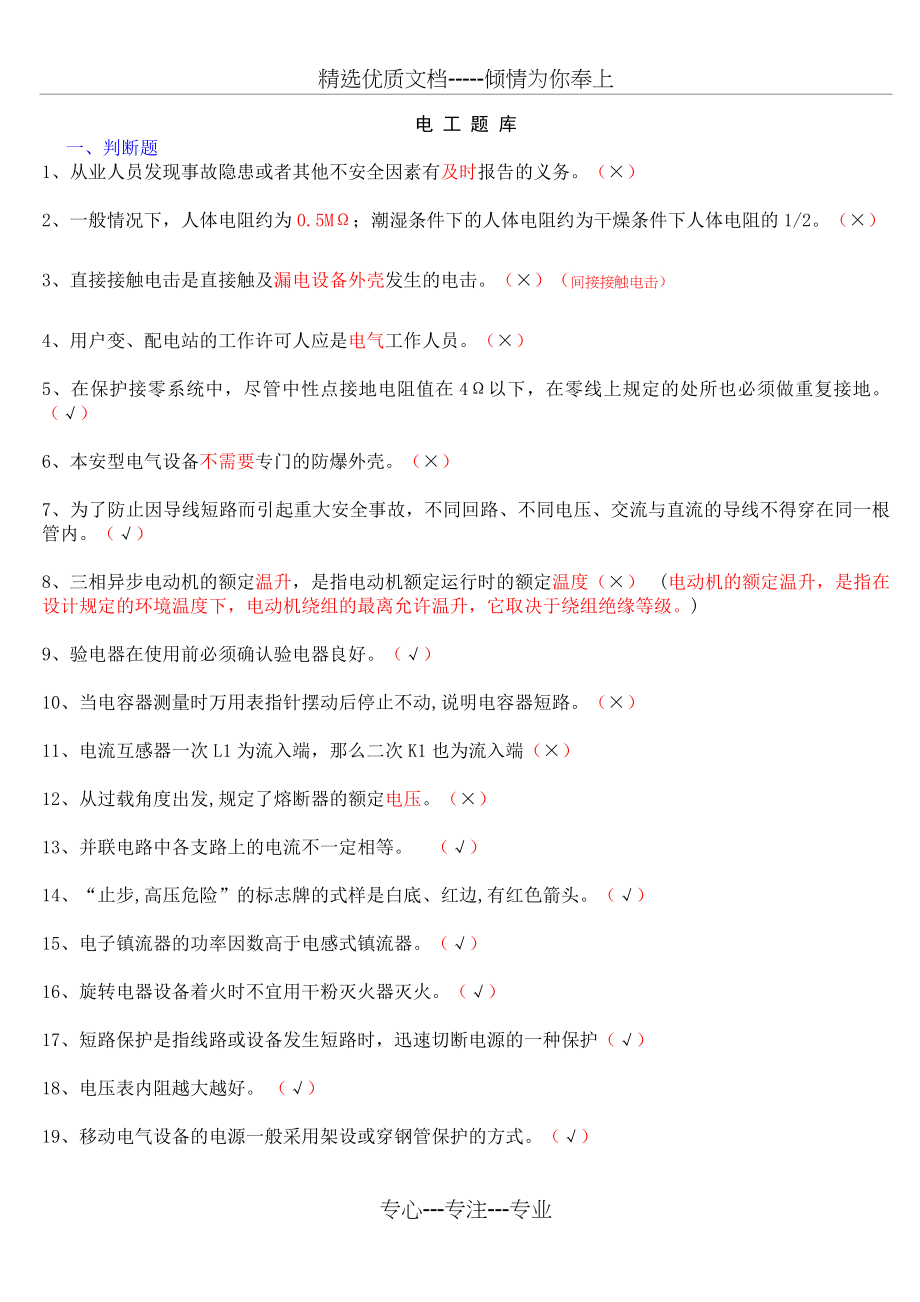
特种作业低压电工全国最新题库2017(全部)《电工》题库(共101页)
公司客服个人工作计划标准范本(3篇).doc
售后客服年终工作总结.doc
优质护理工作计划参考范本(3篇).doc
水轮机调速器机械检修工试题初级
《夜莺的歌声》训练素材
年高中英语人教版必修2同步练习:unit 5 section 1【含答案】
咖啡书吧创业计划书.doc
环境工程认知实习报告
财务部2023年上半年工作总结标准范文(2篇).doc
2023年监理个人最新工作计划范文三篇
(精品)风险防控考试
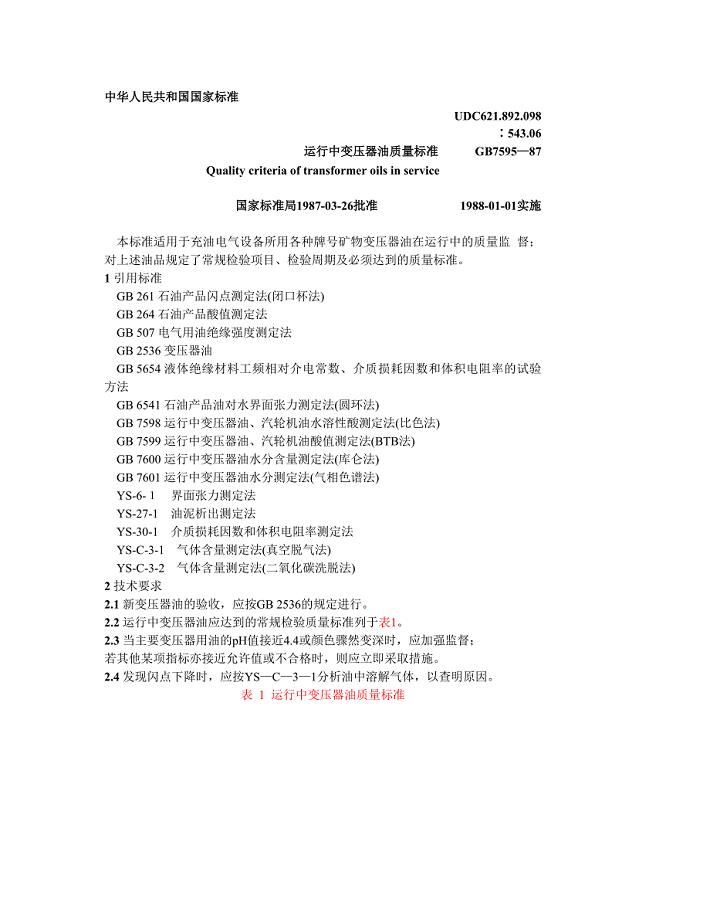
运行中变压器油质量标准GB7595—87
热门工作述职报告模板9篇
信任的作文
中心前台岗位职责(四篇).doc
 高中一年级地理必修一知识点总结(人教版)
高中一年级地理必修一知识点总结(人教版)
2023-06-28 17页
幼儿园大雪飘飘 教案
2022-10-17 2页
乘飞机旅行常用英语口语及词汇总结
2022-08-18 4页
学习总结__10kV三芯交联冷缩电缆终端头的制作过程
2023-02-14 4页
企业交流学习心得
2023-11-27 2页
施工现场临时设施工程施工设计方案
2022-10-29 13页
2015新版七年级的初一下册英语单词汇表
2023-09-08 12页
采暖系统的设计流程
2024-01-10 4页
C语言编写的多位阶乘算法程序
2022-11-25 2页
科学实验及仪器使用记录
2023-12-10 40页