
伺服系统工作原理
12页
1、称随动系统,属于自动控制系统中的一种,它用来控制被控对象的转角(或位移),使其能自动地、连续地、精确地复 规输入指令的变化规 律。它通常是具有负反馈的闭环控制 系统,有的场合也可以用开环控制来实现其功能。在实际应用中一般以机械位置或角度作为控制对象的自动控制系 统,例如数控 机床等。使用在伺服系统中的驱动电机要求 具有响应速度快、定位准确、转动惯量较大等特点,这类专用的电机称为伺服电机。其基本工作原理和普通的交直流 电机 没有什么不同。该类电机的专用驱动单元称为伺服驱 动单元,有时简称为伺服,一般其内部包括转矩(电流)、速度和/或位置闭环。其工作原理简单的说就是在开环控制的交直流电机的基础上将速度和位置信号通过旋转编码器、 旋转变压器等反 馈给驱动器做闭环负反馈的 PID调节控制。 再加上驱动器内部的电流闭环,通过这3个闭环调节,使电机的输出对设定值追随的准确性和时间响应特性都提高很 多。 伺服系统是个动态的随动系统,达到的稳态平衡也是 动态的平衡。 全数字伺服系统一般采用位置控制、速度控 制和力矩控制的三环结构。系统硬件大致由以下几部分组成:电源单元;功率逆变和保护单元;检测器单元;
2、数字控制器单元;接口单元。相对应伺服系统由外到内的”位置、 速度、转矩三个闭环,伺服系统一般分为三种控制方式。在使用位置控制方式时,伺服完 成所有的三个闭环的控制 在使用速度控制方式时,伺服完成速度和扭矩(电 流)两 个闭环的控制。一般来讲,我们的需要位置控制的系统,既 可以使用伺 服的位置控制方式,也可以使用速度控制方式, 只是上位机的处理不同。另外, 有人认为位置控制方式容 易受到干扰。而扭矩控制方式是伺服系统只进行扭矩 的闭 环控制,即电流控制,只需要发送给伺服单元一个目标扭矩 值,多用在单 一的扭矩控制场合,比如在小角度裁断机中, 一个电机用速度或位置控制方式, 用来向前传送材料,另 一个电机用作扭矩控制方式,用来形成恒定的张力。 伺 服机构系统源自 servomechanism system ,系指经由闭回 路控 制方式达到一个机械系统位置、速度、或加速度控制 的系统。一个伺 服系统的构成通常包含受控体 (plant) 、致 动器 (actuator) 、控制器 (controller) 等几个部分,受控体系 指被控制的物件,例如一格机械手 臂,或是一个机械工作 平台。致动器
3、的功能在於主要提供受控体的动 力,可能以 气压、油压、 或是电力驱动的方式呈现, 若是采用油压驱 动 方式,一般称之为油压伺服系统。目前绝大多数的伺服系统 采用电 力驱动方式,致动器包含了马达与功率放大器,特 别设计应用於伺服系统的马达称之为伺服马达(servo motor) ,通常内含位置回授装置, 如光电编码器 (optical encoder) 或是解角器 (resolver) ,目前主要应用於 工业界的伺服马达包括直流伺服马达、永磁交流伺服马达、与感应交 流伺服马达,其中又以永磁交流伺服马达占绝大多数。控制 器的功能 在於提供整个伺服系统的闭路控制,如扭矩控制、 速度控制、与位置 控制等。目前一般工业用伺服驱动器 (servo drive) 通常包含了控制器与 功率放大器。 一个传统 伺服机构系统的组成如图 1 所示,伺服驱动器主要 包含功 率放大器与伺服控制器,伺服控制器通常包含速度控制器与扭矩控制器,马达通常提供类比式的速度回授信号,控制界面采用 10V 的类比讯号,经由外回路的类比命令, 可 直接控制马达的转速或扭矩。 采用这种伺服驱动器, 通常 必 须再加上一个位置控制
4、器 (position controller) ,才能完成 位 置控制。图 2 所示是一个现代的伺服机构系统架构图, 其 中 的伺服驱动器包含了伺服控制器与功率放大器,伺服马达 提供解析度的光电编码器回授信号。 图 1. 一个传统伺服机 构系统的组成 图 2. 现代伺服机构系统的组成 多轴运动控 制系统 精密伺服系统多应用於多轴运动控制系统,如工业 机 器人、工具机、电子零件组装系统、 PCB 自动差建机等 等。 图 3 所示是一个运动控制平台的方块图,工作物件的 位置控 制可藉由平台的移动来达成,平台位置的侦测有两 种方式, 一种是藉由伺服马达本身所安装的光电编码器, 由於是以 间接的方式回授工作物件的位置,再藉由闭回路 控制达到 位置控制的目的,因此也称之为间接位置控制(indirect position control) 。另一种方式是直接将位置感测元 件安装 在平台上,如光学尺、雷射位置感测计等等,直接 回授工 作物件的位置,再藉由闭回路控制达到位置控制的 目的, 称之为直接位置控制 (direct position control) 。 一个 多轴运动控制系统由高阶的运动控制
《伺服系统工作原理》由会员大米分享,可在线阅读,更多相关《伺服系统工作原理》请在金锄头文库上搜索。
2023年地震科普携手同行活动观后感
幼儿园师德培训计划范文(二篇).doc

大兴区2011~2012学年度第二学期模拟试卷(二)

安全生产事故反思活动方案
初中中考百日誓师大会教师发言文稿2
公司质量手册范本
2023年统计工作计划样本(4篇)
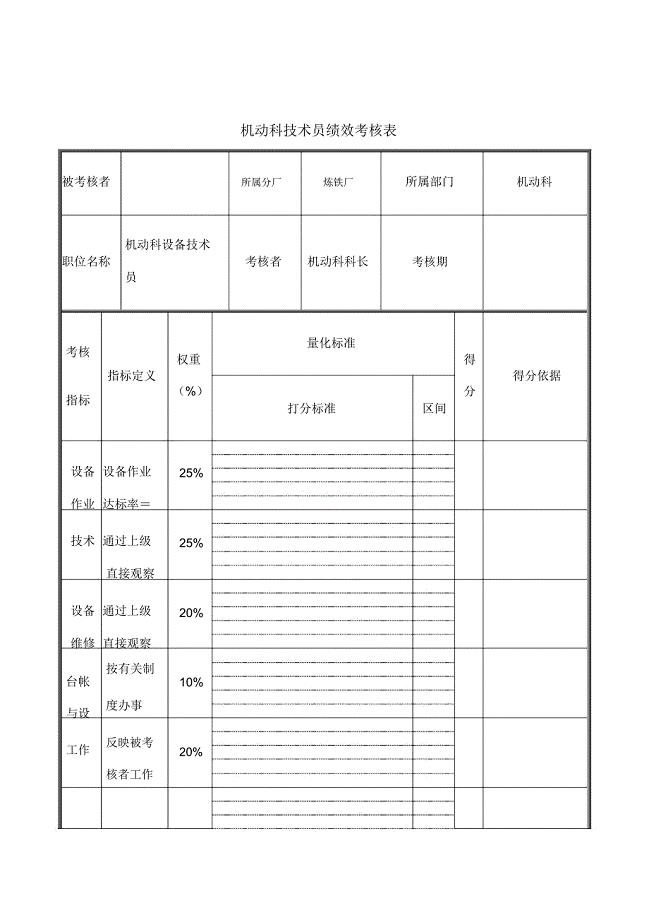
机动科技术员绩效考核
应急设施设备和物资储备管理制度(8篇)
合唱艺术大师讲学班学习体会
广告塔座制作协议书范文(九篇)
2023工厂员工培训计划参考范文(2篇).doc
5S管理和TPM生产维护讲座
环保局局长在广播电台的讲话
2013年3月襄阳市普通高中调研统一测试高三理科数学试卷
建筑企业财务工作计划范文(五篇).doc
汽车吊架梁专项施工方案
2019年教导处管理工作计划
讨论职业教育大发展催生的教学督导与课程督导
小学科学实验室年度工作总结
 标准个人房屋租赁合同12篇(个人房屋租赁合同标准版)
标准个人房屋租赁合同12篇(个人房屋租赁合同标准版)
2022-10-03 52页
洗煤生产科一年度工作总结
2023-08-18 9页
文明礼仪演讲稿(通用15篇).doc
2022-12-25 32页
2023年小学班主任个人工作总结模板
2023-10-30 15页
生活中培养孩子审美能力
2022-10-13 10页
顾客投诉处理技巧
2024-03-01 4页
《答谢中书书》
2022-09-02 8页
2019年资金主管岗位说明书模板
2024-01-26 1页
工业园区考察报告资料
2023-03-15 14页
关于工程工程合同范文4篇
2022-08-08 11页