
Bode图法控制系统设计---串联滞后校正解析
16页
1、重庆交通大学自动控制课程设计课题:ode图法控制系统设计一串联滞后校正作 者:学 号:专 业:班 级:指导教师:2013.06.28在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用, 而自 动控制理论是自动控制科学的核心。自动控制理论自至今已经过了三代的发展。现代控制理论已广泛应用于制造业、农业、交通、航空及航天等众多产业部门。自动控制理论从线性近似到非线性系统的研究取得了新的成就,借助微分几何的固有非线性框架来研究非线性系统的控制,已成为目前重要研究方向之一。在控制技术需求推动下,控制理论本身也取得了显著进步。为了实现各种复杂的控制 任务首先要将被控制对象和控制装置按照一定的方式连接起来,组成一个有机整体,这就是自动控制系统。本次课程设计是利用滞后-超前校正网络来校正系统以改善系统性能,首先 应该根据原有系统和初始条件要求来确定校正系统,然后利用MATLA分析校正后的系统是否达到要求以及其性能。关键字:自动控制MATLAB滞后-超前校正 系统分析前言2一、设计任务 51、设计要求 52、设计方案分析 53、控制器的 MATLAB程序实现 6二、控制系统的模拟化设计 71、
2、模拟控制器的离散化 7A、冲激不变法 7B、加零阶彳持器的Z变换法 8C、差分变换法 8D、双线性变换法 8E、频率预畸变双线性变换法 92、控制器的MATLAB 离散程序 93、控制器的计算机实现 9A、直接程序设计法 9B、用行程序法10C、并行程序法 11D、控制器的计算机实现流程图 11三、控制系统的MATLAB实现 121、控制系统的 MATLAB仿真 122、控制系统的 simulink仿真 13四、小结 14五、参考文献 15一、设计任务Bode图法控制系统设计-串联滞后校正、10设被控对象的传递函数为Go(s)=s(s 5)1、设计要求(1)开环增益 Kv=20(2)频率裕量丫 =70(3)对此控制器进行离散化,并用计算机程序实现(划出流程图)(4)用Matlab对系统进行仿真,分析系统的阶跃响应2、设计方案分析系统要求使用Bode图法对控制系统进行设计,同时要求采用串联滞后校正。一、Bode图法在Bode图中的对数频率特性的低频区表征了闭环系统的稳定特性,中频区表征了系统的相对稳定性,而高频区表征了系统的抗干扰特性。在大多数实际情况中, 校正问题的实质上是一个在稳定精
3、度和相对稳定性之间取折中的问题。为了获得比较高的开环增益及满意的相对稳定性,必须改变开环频率特性响应曲线的形状,这主要体现为:在低频区和中频区增益应足够大,且中频区的对数幅频特性的斜率应为一20d吃,并有足够的宽带,以保证适当的相角裕度;而在高频区,要使增益尽可,dec能的衰减下来,以便使高频噪声的影响达到最小。下面讨论一下基于Bode图法的串联超前校正的方法及 MATLA取现。二、串联滞后校正串联滞后校正的主要作用在不改变系统动态特性的前提下,提高系统的开环放大倍 数,使系统的稳态误差减小,并保证一定的相对稳定性。设滞后校正装置的传递函数为1 aTs.MKE1. Bode图的几何设计方法用这种方法设计滞后校正装置的步骤如下。(1) 根据稳态指标确定未校正系统Go(s)的型别和开环增益 K,并绘制Bode图。(2) 根据动态指标要求确定滞后校正装置的参数,分两种情形加以讨论。第一种情形:给出了 0c的要求值。-, .1根据 201g |Go(j8c)|=-20lg a,求出 a的值。a=|Go (j -c)|为了减少滞后校正对系统的影响,通常取1/aT忠(1/5 1/10)6-并求出T
4、 =1 0 /伞c 。)第二种情形:未给出的要求值。6c若相角裕度不不足,找出满足尸的频率点作为校正系统的剪贴频率,然后按第一种情形额步骤处理。验算性能指标3、控制器的MATLAB程序实现本设计主要运用 bode图法的MATLA改计方法,主要利用伯德(Bode)图进行系统的设 计,用到的函数有:Bode-伯德图作图命令;Logspace用于在某个区域中产生若干频点;Polyval 求多项式的值;Ceil 一朝正无穷大方向取整;ng0=10;dg0=1,5,0;g0=tf(ng0,dg0);t=0:0.01:3;w=logspace(-2,2);kk=10;pm=70;mu,pu=bode(kk*ng0,dg0,w);wgc=spline(pu,w,pm+5-180),ngv=polyval(kk*ng0,j*wgc);dgv=polyval(dg0,j*wgc);g=ngv/dgv;alph=abs(1/g),t=10/alph*wgc,ngc=alph*t,1;dgc=t,1;gc=tf(ngc,dgc),g0c=tf(kk*g0*gc);b1=feedback(kk*g0,1);b
《Bode图法控制系统设计---串联滞后校正解析》由会员鲁**分享,可在线阅读,更多相关《Bode图法控制系统设计---串联滞后校正解析》请在金锄头文库上搜索。
有关五四青年节演讲稿范文集锦10篇
最新湘教版小学一年级上册美术教案全册

北师大版八年级数学下册分式名师讲义含答案
小柳树和小枣树教学设计一
高一英语老师工作计划(三篇).doc
总务处工作计划参考范文(二篇).doc
三峡实习报告
体育教师工作总结实范文(二篇).doc
龙额镇中心校长期支教协议
成品库管理规定
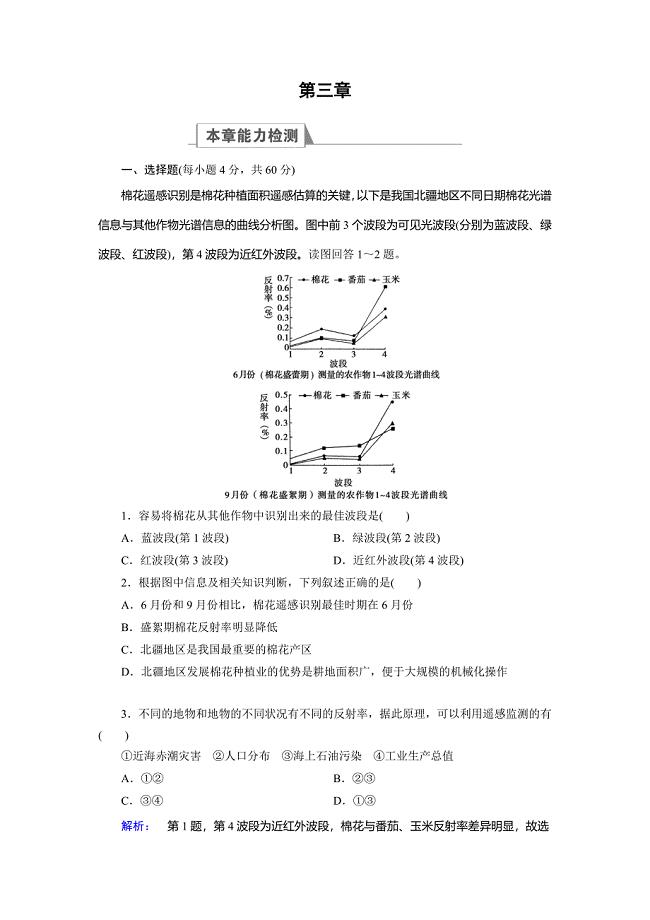
高中湘教版 地理必修3检测:章末高效整合3 Word版含解析
管理员工的10个绝招管理方法
上海市厂房租赁合同范本(2篇).doc
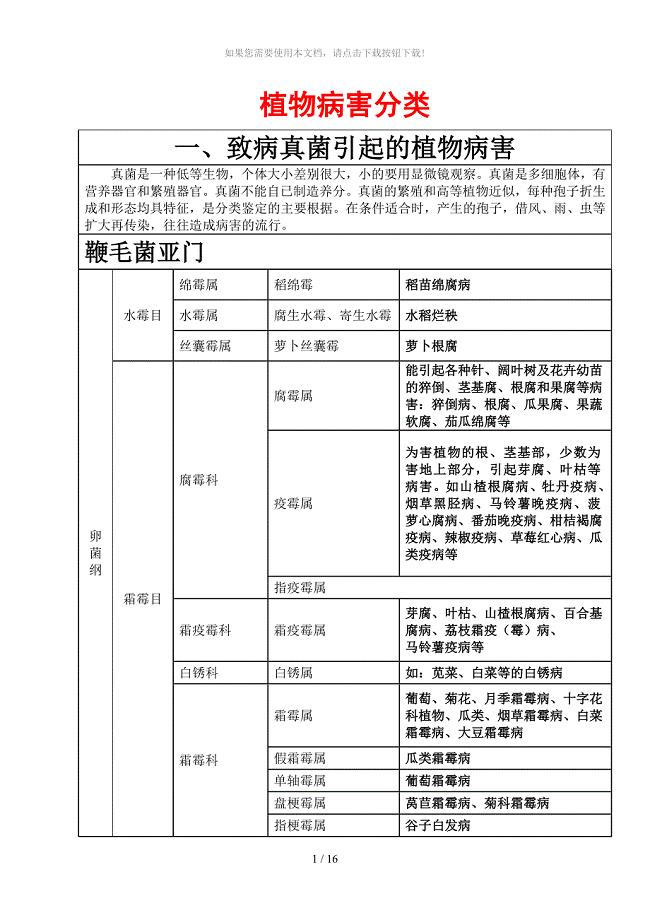
植物病害分类
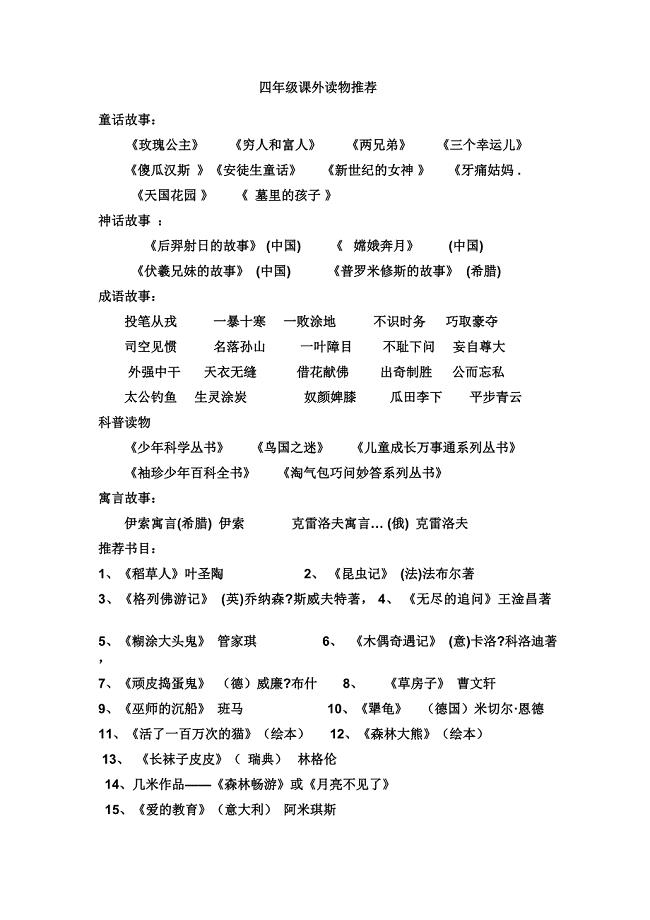
四年级课外读物推荐
2023年交通注意安全的范文
植物生理学复习思考题与答案名师制作优质教学资料
第三方房屋租赁合同范本

正式的离婚协议书标准范文(2篇).doc
初一体育教学工作计划例文(四篇).doc
 农村土地租赁合同范本
农村土地租赁合同范本
2023-07-22 6页
2020年工作计划_年度工作计划
2023-06-04 6页
关于中学英语课堂教学状况的调查报告
2022-08-19 4页
学年工作安排三篇
2023-06-29 16页
语文教材更应与时俱进四辩稿精编版
2022-08-30 1页
小学生好书推荐《草房子》
2023-04-14 1页
办公室文员个人工作总结
2022-09-10 12页
教师教学工作考核制度
2022-10-14 4页
有关五四青年节演讲稿范文集锦10篇
2022-11-24 23页
爱岗敬业演讲稿汇总8篇
2023-08-17 20页