
数控插补实验指导书
14页
1、数控插补实验指导书1 实验目的11 熟悉逐点比较法的基本原理和直线插补程序流程。12 了解逐点比较法直线插补程序及其调试过程。13 体验逐点比较法圆弧插补程序及其工作过程2 实验设备PC兼容机一台,操作系统为Windows XP 、WV仿真器及配套器件一套、数控二维平台一台、运动控制实验室自制的StepMotorDriver1板卡一块。3 实验原理数控机床在加工过程中,移动部件(刀具或工件)要进行移动,移动部件的最小位移量是一个脉冲当量,脉冲当量是与一个脉冲相当的位移量。移动部件的运动是以一个一个脉冲当量步进移动的。所谓插补就是数控系统以一定的方法来确定刀具运动轨迹的过程,即进行数据的“密化”。根据被加工零件的有限坐标(直线的起点和终点,圆弧的起点、终点、圆心和半径)、加工轮廓的特征、刀具参数,进给速度和进给方向的要求等,运用一定的算法,自动地在轮廓的起点和终点之间计算出若干中间点的坐标值,从而自动地对各坐标轴进行脉冲分配,完成整个轮廓的轨迹运行,这就是插补要完成的任务。在对加工路径数据密化过程中,由于每个中间点计算所需要的时间直接影响到系统的控制速度,而每个插补中间点的计算精度又影响
2、到整个系统控制精度,所以插补算法对整个数控系统的性能至关重要。可以说,插补是整个数控系统控制软件的核心。逐点比较法插补实验逐点比较法插补的原理是,刀具在进给过程中,不断比较刀具与被加工零件轮廓之间的相对位置,并根据比较结果决定下一步的进给方向,使刀具向减小偏差的方向进给。具体来说是,每走一步都要和给定轨迹上的坐标值进行一次比较,视该点在给定轨迹的上方或下方,或在给定轨迹的里面或外面,从而决定下一步的进给方向,使之趋近加工轨迹。逐点比较法是以折线来逼近直线、圆弧或各类曲线,它与规定的直线或圆弧之间的最大误差不超过一个脉冲当量。因此,只要将脉冲当量取得足够小,就可以达到加工精度的要求。3.1 直线插补原理(一)偏差计算公式假定加工如图3-1所示第一象限的直线OA。取直线起点为坐标原点,直线终点A坐标(Xe,Ye)是已知的。m(Xm,Ym)为加工点(动点),若m在OA直线上,则根据相似三角形的关系可得 取 (3-1) 称为直线插补的判别式。 若Fm=0,表明m点在直线OA上;若Fm0,表明m点在直线OA上方的m处;若Fm0时,表明m点在直线OA下方的m处。对于第一象限直线,从起点出发,沿+X
3、轴方向走一步,当Fm0时,沿+Y方向走一步,当两方向所走的步数与终点坐标(Xe,Ye)相等时,发出到达终点信号,停止插补。设在某加工点处,若Fm0时,应沿+X方向进给一步,走一步后新的坐标值为 Xm+1=Xm +1 Ym+1=Ym 新的偏差为 Fm+1= Ym+1Xe-Xm+1Ye= Fm-Ye (3-2)若Fm0, 应向+Y方向进给一步,走一步后新的坐标值为 Xm+1=Xm Ym+1=Ym +1新的偏差为Fm+1= Fm +Xe (3-3)式(3-2)、(3-3)为简化后的偏差计算公式,在公式中只有加,减运算,只要将前一点的偏差值与等于常数的终点坐标Xe,Ye相加或相减,即可得到新的坐标点的偏差值。加工的起点是坐标原点,起点的偏差是已知的,即F0=0,这样随着加工点的前进,新加工点的偏差Fm+1都可以由前一点的偏差Fm和终点坐标值相加或相减得到,称为递推法。(二)终点判别逐点比较法的终点判断有多种方法,下面介绍两种。1. 第一种方法 设置X、Y两个减法计数器,加工开始前,在X、Y计数器中分别存入终点坐标值Xe、Ye,在X坐标(或Y坐标)进给一步时,就在X计数器(或Y计数器)中减去1,
4、直到这两个计数器中的数都减到零时,便到达终点。2. 第二种方法 用一个终点计数器,寄存X和Y两个坐标,从起点到达终点的总步数=Xe+Ye;X、Y坐标每进给一步,减去1,直到为零时,就到了终点。本实验中采取了第二种方法。 (三)插补运算过程插补计算时,每走一步,都要进行以下四个步骤(又称四个节拍)的算术运算或逻辑判断,其工作循环如3-2图所示。1. 方向判定 根据偏差判定进给方向。2. 坐标进给 根据判定的方向,向该坐标方向发一进给脉冲。3. 偏差计算 每走一步到达新的坐标点,按偏差公式计算新的偏差。4. 终点判别 判别是否到达终点,就结束该插补运算;如未到达,再重复上述循环步骤。 逐点比较法直线插补计算流程如下图3-3所示。以上是采用逐点比较法进行直线插补的工作原理及程序流程图。需要说明的是,我们在实验室做插补实验时,是不能直接采用教科书中的相关例题中的数据的。原因很简单,因为对于实验室中由步进电动机驱动的二维平台来说,其脉冲当量很小,(当步进电动机驱动器的细分设置值选定在4时,实测脉冲当量大约在5um左右,实际数控机床系统的脉冲当量可能更小)而课本上的例题,为了在有限的篇幅中说明插补
《数控插补实验指导书》由会员汽***分享,可在线阅读,更多相关《数控插补实验指导书》请在金锄头文库上搜索。
关于在景区开展“爱岗敬业、尽职尽责”主题教育活动的意见
2023年少先队六一节活动总结范文(3篇).doc
学校安全隐患排查记录
2023推销实践报告
电加热管制作工艺的设计说明
2022年关于以善良为主题的演讲稿
学生会宣扬部竞选演讲稿
最新优质肉牛养殖基地项目可行性研究报告(DOC 60页)
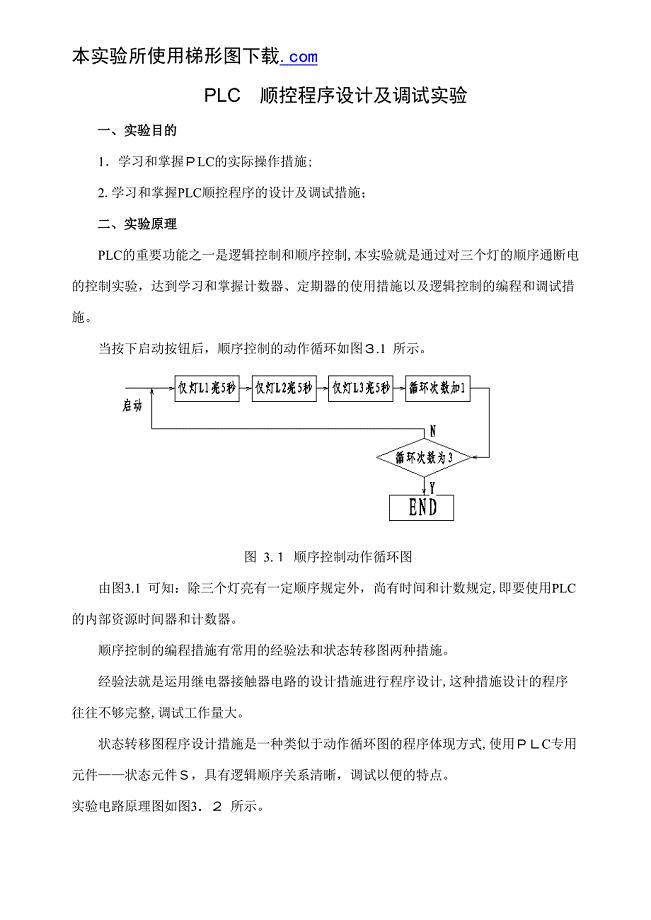
PLC-顺控程序设计及调试实验
公司环境保护管理制度
工作总结公司总经办上半年工作总结范文
劳动合同书范文医疗器械公司
精选老师自我介绍锦集五篇
光通信产品项目可研报告(范文)
小学后勤工作人员个人总结

PEP小学英语四年级下册第二单元练习
江苏省盐城市建湖县2018-2019学年七年级下学期期末考试数学试题(解析版)
东北财经大学2022年3月《信息系统分析与设计》期末考核试题库及答案参考42
一年级下册苏教版近义词反义词

浙江省绍兴地区九年级中考数学复习讲义 第9课时 方程组的解法
 模板安装作业指导书
模板安装作业指导书
2022-12-29 9页
Oracle SQL优化--精选文档
2022-08-13 32页
P60B型耙斗装岩机使用维护说明书
2022-11-20 9页
GPS行驶记录仪功能说明(110506)
2022-07-13 3页
会计八班十二月份团活记录
2022-10-09 4页
房地产销售技巧.doc
2023-06-06 11页
斑贴试验及皮肤过敏测试器使用说明书
2024-02-21 2页
HUSKY机培训资料--精选文档
2023-03-12 16页
RADWIN 2000安装调试指南--精选文档
2023-02-04 11页
达芙文(阿达帕林凝胶)说明书
2023-02-11 3页