
立体仓库巷道式堆垛机设计
42页
1、编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页 共1页1 绪论1.1 本课题研究的背景及意义我国现在正处于工业化、城市化发展的高速期,未来一段时间内,土地资源和劳动力资源将会成为制约企业发展的瓶颈,鉴于此,建造立体仓库是未来企业发展趋势,自动化立体仓库是现代物流中的重要组成部分,是实现物流系统合理化的关键。它具有空间利用率高,便于实现自动化管理,实时自动结算库存货物种类和数量等许多优点,对加快物流速度、提高劳动生产率、降低生产成本很重要,已开始应用于汽车、电子、医药、烟草、建材、邮电等许多行业。堆垛机是自动化立体仓库中最重要的搬运、起重、堆垛设备,对立体仓库的出入库效率有决定性影响,是立体仓库能否达到设计要求的关键设备之一。而我国在堆垛机制造技术上和世界发达国家有很大差距,鉴于我国未来物流业发展的广阔空间,堆垛机技术落后必将成为限制我国自动化立体仓库发展的瓶颈,使我国在国际物流业竞争中处于不利地位。鉴于以上因素,发展堆垛机技术有积极意义。1.2 有轨巷道堆垛机的发展现状有轨巷道堆垛起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆垛机。其主要用途是
2、在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格,或者相反,取出货格内的货物运送到巷道口,完成出入库作业。20世纪70年代初期,我国开始研究采用巷道式堆垛机的立体仓库,1980年我国第一座自动化立体仓库在北京汽车制造厂投产,从此自动化立体仓库在我国得到了迅速发展。据不完全统计,到目前已建成三百余座。堆垛机做为立体仓库中最重要的起重运输设备,也得到了较快的发展。早期的堆垛机是在桥式起重机的起重小车上悬挂一个门架,利用货叉在立柱上的上下运动及立柱的旋转运动来搬运货物,通常称之为桥式堆垛机。1960年左右在美国出现了巷道堆垛机,这种堆垛机是在地面的导轨上行走,利用货架上部的导轨防止倾倒。随着立体仓库的发展,巷道堆垛机逐渐替代了桥式堆垛机。随着计算机控制技术和自动化立体仓库的发展,堆垛机的应用越来越广泛,技术性能越来越好,高度也在不断增加,到1970年实现了由货架支承的高度为40米的堆垛机。堆垛机的运行速度也不断提高,目前堆垛机水平运行速度可达200m/min,起升速度高达120m/min,货叉伸缩速度达50m/min。2004年国际物流综合展览会上推出的超高效能巷道堆垛机“H-V
3、1”,走行速度500m/min,加减速0.5G,处理能力每小时500箱,实现了自动化立体仓库存取效率的飞跃。80年代初期,巷道堆垛机的运行能力主要由机械的速度模式来决定,速度控制是将子母电机或变极电机进行复合,机械式地进行速度切换来控制高速、低速运行。因此,最高行走速度不超过100m/min,最高升降速度不超过20m/min,在高速化上受到了制约。于是,在速度控制方面采用了直流电机的电压切换控制方式,使巷道堆垛机的最高行走速度达到125m/min,最高升降速度达到30m/min。但是,伴随高速化的另一个重要问题是停止,为了滑动停止就必须降到很低的速度。当进行速度切换时,由于急加减速而形成的或是由于制动停止而引起的冲击,诱发了机械的振动。现代堆垛机多使用变频调速,速度控制更加平稳,解决了变速时的冲击问题,但是在堆垛机制动器抱闸停止时,也会产生冲击,在堆垛机机架较高的情况下,造成机架晃动,目前只能通过改善控制减小冲击,尚无更好的解决办法。目前,我国巷道堆垛机的性能参数和可靠性有待进一步提高。国产堆垛机的质量相对国外堆垛机而言差距较大,为使国产堆垛机赶超国际水平,应加强自主研究和开发。1.3
4、 本课题设计任务及要求此堆垛机用于机械加工工厂的毛坯、零件仓库,仓库货架总高度为10m,货物单元长、宽尺寸为1200x1000mm,额定负载800kg,最高行走速度120m/min,最高升降速度30m/min,最高货叉速度30m/min,首层货架高度600mm,负载单元器具为托盘或货箱,货叉数为双货叉,每小时出入库20次,平均工作周期3min。本次毕业设计对堆垛机的机械结构进行设计,主要包括门架结构、行走机构、升降机构、货叉伸缩机构。设计出更合理堆垛机门架结构,在保证其强度及刚度条件下尽量减轻整机重量,同时,设计出能减轻堆垛机制动时晃动的辅助天轨制动装置和更加简单可靠的断绳保护装置。2 堆垛机总体方案的确定堆垛机工作于立体仓库货架之间,为节省空间,加大有限空间存货量,现代立体仓库货架间距做的很窄而高度很高。堆垛机在此环境下工作,决定其整体结构高而窄,为防止倾倒,将堆垛机行走轨道设计成上下双轨,下部地轨起支撑和引导作用,上部天轨可支持堆垛机直立行走,保证不发生倾倒事故。高而窄的结构也造成堆垛机沿高度方向刚度不足,在起停过程中振动严重,会延长定位时间,影响效率,也会造成堆垛机定位不准确,无
《立体仓库巷道式堆垛机设计》由会员cn****1分享,可在线阅读,更多相关《立体仓库巷道式堆垛机设计》请在金锄头文库上搜索。
教师实习自我鉴定范文多篇.doc
中考数学复习第三部分统计与概率第三十三课时频率与概率练习0429354
呼吁环境保护的演讲稿
新三年级班主任工作计划范例
地籍测量教学大纲
中专生的自我鉴定
2023年保险公司晋升会主持词(精选多篇)

江苏省农村传染性非典型肺炎疫情监测与控制流程图
2022年天津市安全员C证考试试题18含答案
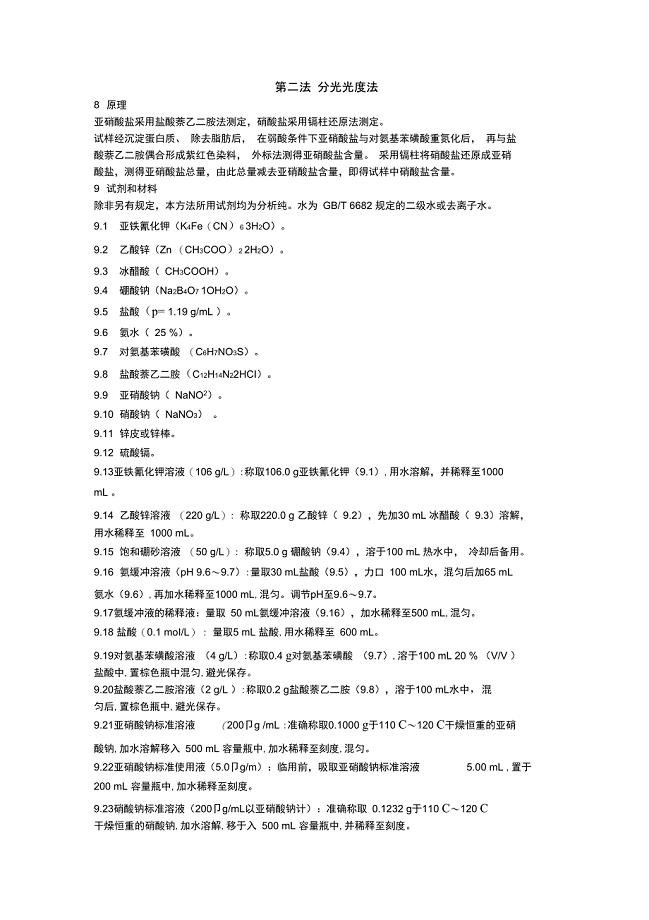
分光光度法测食品中的亚硝酸盐
学校第一学期教研室工作计划.doc
报废车回收拆解及废旧电器电子回收处理项目商业计划书写作模板
石油化工专业本科生的自荐信.doc
三分钟教你鉴别港美股持牌券商
浅谈幼儿园教师的微笑
芦求路电力工程施工方案
关于说课稿集合5篇
超市年终个人工作总结.doc
2023年湖北省孝感市孝南区新华街道宇济社区工作人员考试模拟题及答案
资产评估评分标准
 举一反三文字之谜
举一反三文字之谜
2023-12-07 16页
初一不等式习题及答案
2022-10-18 4页
钢板桩支护中施工方案
2023-10-28 15页
等臂杠杆及夹具说明书(共32页)
2024-01-17 32页
外架连墙件变更施工方案珠海
2023-01-03 12页
中考数学复习第三部分统计与概率第三十三课时频率与概率练习0429354
2022-12-26 2页
佛医病因对治图表
2023-05-23 19页
精品专题资料20222023年收藏广东省手语协会会员名册表
2022-09-12 7页
化合价习题习题
2022-11-15 4页
监理细则范本
2023-05-23 19页