
微机说明书
18页
1、微型计算机课程设计说明书微机系统与接口技术课程的设计汽车防碰撞系统的设计学院名称:_专业班级:学生姓名:学生学号:指导教师姓名:指导教师职称:微机系统与接口技术课程设计任务书一、设计目的1. 建立微机系统概念,加深对微机系统的理解和认识,提 高微机系统的应用能力。2. 进一步学习和掌握微机程序设计和方法,通过应用程序 的编写和调试,学习程序的调试方法。3. 进一步熟悉典型微机接口芯片的使用,接口及系统与外 部设备的连接方法,掌握基本微机系统的应用。二、设计题目微机系统与接口技术课程设计交通灯装置三、设计要求1. 以8086/8088CPU为主控单元构建微机应用系统。2. 进行应用系统的硬件设计,画出电路原理图与线路 连接图。3. 进行应用系统的软件设计,画出软件流程图,写出 主要控制程序。4. 根据实验条件,进行微机应用系统的部分模拟调试 工作,写出调试说明。5. 整理设计说明书,列出参考文献。四、列出使用元件和设备清单五、完成定时计数器8253及中断控制器8259的实验 分 别写出实验报告目录第一章 设计概况11.1 设计背景11.2 设计概述11.3 设计思路11.3.1 传感器设
2、计11.3.2 控制电路设计3第二章 控制电路硬件设计42.1 硬件介绍42.1.1 核心部件8088 微处理器42.1.2 模数转换单元 ADC080942.1.3 数模转换单元 DAC083252.1.4 计时芯片 825352.1.5 8255A 并行口扩展单元 62.1.6 译码器 74LS138 62.1.7 电子音响驱动电路(蜂鸣器)72.1.8 距离传感器72.2 实际电路原理框图7第三章 模拟实验83.1 模拟电路原理框图83.2 模拟电路连线图8第四章 软件设计94.1 主程序流程图94.2 程序代码104.3 软件调试11第五章 元器件与设备清单12第六章 设计总结13第七章 参考文献13第一章 设计概况1.1设计背景随着社会经济的发展, 越来越多的人拥有了自己的私家车,越来越多的汽车涌上了公 路, 可随之而来的是交通事故也越来越多, 不少人也因此谈车色变。作为主动式车辆安全 系统之一的车辆防碰撞系统受到国内外汽车研究人员的高度重视, 也取得了很多成果。防 碰撞系统主要用在追尾碰撞系统、侧防系统、 倒车雷达三个方面。其中倒车雷达技术比较 成熟, 成本也比较低, 在世
3、界各地都有广泛的应用; 追尾碰撞系统和侧防系统在世界多 个知名汽车制造商也都有成功的研究与应用, 但是价格还比较高, 未能在中、 低档车中 推广,还需要进一步完善、 降低成本。追尾事故在整个交通事故中占很大的比例, 如中国高速公路追尾事故数约占总事故数 的 33.4% , 美国高速公路上发生的追尾碰撞事故约占事故总数的 24% 。车辆防追尾碰撞 系统就是在汽车在有追尾碰撞危险时,能立刻发出警报信号, 提醒司机及时处理,并在必 要的时候自动启动制动系统, 尽量避免交通事故的发生。所以研究一种实时、 可靠、 适 应性好的车辆防追尾碰撞系统是提高车辆安全的一项非常重要的内容。车辆防追尾系统就是 在行驶中检测车辆前、 后方的车辆或障碍物的信息, 如己车的速度、 加速度, 相关车的 速度、 加速度, 两车之间的距离等参数, 用相关的安全距离模型进行追尾碰撞判断, 做 出不报警、 报警、制动处理。防追尾碰撞系统主要应用有毫米波雷达、激光测距、高精度 的摄像系统测距和红外线测距。1.2设计概述本设计采用INTEL8088CPU, ADC0809模数转换芯片,DAC0832数模转换芯片,8253计 时
4、芯片,8255A并行接口电路芯片等硬件搭建汽车自动防碰撞系统。系统可实现距离测量, 距离实时显示,危险距离报警,并可对发动机进行柔和制动,而不会由于急刹而对车内乘客 造成伤害。本系统也可根据不同需要由乘客自主决定是否开启自动防碰撞系统,从而避免在 拥挤路段行车或停车时误触发报警系统,为了保证乘客安全,防止乘客关闭系统后忘记重启系统而发生车祸,造成不必要 的人身财产损失,系统加入了提醒功能,即系统关闭一段时间后为重启则会启动蜂鸣器报警。1.3 设计思路1.3. 1 传感器设计在现代测距系统当中,还有以下测距方法:1)毫米雷达测距 毫米雷达测距能够探测多目标,多目标分辨力好,探测精度高,受天气影响小,但存在 电磁干扰问题,必须防止因雷达装置相互间以及其他通信设施的电磁波干扰而发生误动作。 其多用于高速公路上的防追尾碰撞。2)摄相系统测距 目标摄像系统模仿人体视觉原理,测量精度高,但目前价格较高,同时受到软件和硬件 制约,成像速度角慢。3)激光测距 由于激光测距受恶劣的天气,汽车的激烈震动,反射镜表面摩损,污染等因素的影响, 使反射的激光束在一定功率上探测距离比可能探测的最大距离减少1/2
《微机说明书》由会员枫**分享,可在线阅读,更多相关《微机说明书》请在金锄头文库上搜索。
甘肃省白银市会宁县第四中学高二数学下学期期中试题0507
幼师演讲稿七篇
保险业务员半年工作总结范文
浅论怎样写选好真情实感的素材

初中化学第四单元自然界的水单元测试题及答案(DOC 7页)
关联理论视角下的《井冈山》名家英译对比赏析
侯马市危险化学品安全生产检测项目可行性分析报告
求椭圆方程专地题目练习
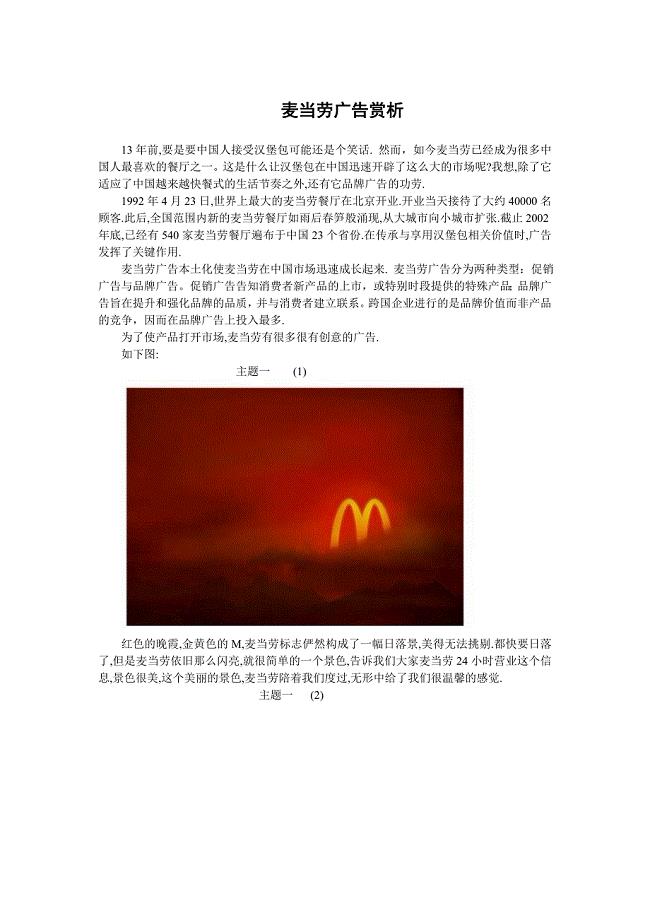
麦当劳广告赏析

某工厂信息平台技术建议书
池州市关于成立社区公共服务公司可行性分析报告【模板范文】
三方股东合作协议书范本
《生活中的冷色》教案
大班民间游戏优秀教案及教学反思《斗鸡》
基础知识运用(教育精品)
学习职业道德规范心得体会
2021年销售内勤个人述职报告
2022年金属非金属矿山(露天矿山)安全管理人员资格证书考试及考试题库含答案套卷77
2023关于于读书的演讲稿汇编七篇
一年级活着读书笔记1000字
 2017年执业医师真题及答案
2017年执业医师真题及答案
2023-09-08 23页
仪表的防爆与防护
2022-07-26 17页
雨水污水管道施工方案工艺
2023-11-08 23页
装饰装修工程施工项目如何提速增效
2023-04-02 6页
《现代汉语》名词解释
2023-10-29 13页
动手做做看评课稿
2023-09-20 8页
抗 SSA 抗体在自身免疫性疾病中的临床应用价值探讨
2023-10-29 5页
2016年咨询工程师继续教育考试BIM考题
2023-05-14 6页
结构顶板裂缝处理专项方案
2023-05-18 4页
做个有智慧的人
2022-07-27 27页